Утверждены
Директором ЦНИИСК
им. В.А. Кучеренко
11 марта 1988 года
ОРДЕНА ТРУДОВОГО КРАСНОГО ЗНАМЕНИ
ЦЕНТРАЛЬНЫЙ НАУЧНО-ИССЛЕДОВАТЕЛЬСКИЙ
И ПРОЕКТНО-ЭКСПЕРИМЕНТАЛЬНЫЙ ИНСТИТУТ
КОМПЛЕКСНЫХ ПРОБЛЕМ СТРОИТЕЛЬНЫХ КОНСТРУКЦИЙ
И СООРУЖЕНИЙ им. В.А. КУЧЕРЕНКО ГОССТРОЯ СССР
РЕКОМЕНДАЦИИ
ПО РАСЧЕТУ СООРУЖЕНИЙ С ПОДВЕШЕННЫМИ МАССАМИ
НА СЕЙСМИЧЕСКИЕ ВОЗДЕЙСТВИЯ
Рекомендованы к
изданию решением секции "Сейсмостойкость сооружений"
Научно-технического совета ЦНИИСК им. В.А. Кучеренко Госстроя СССР.
Содержат
алгоритм определения расчетной сейсмической нагрузки для гражданских зданий с подвешенными
этажами, промышленных сооружений с тяжелым подвешенным технологическим
оборудованием, сооружений тепловых электростанций с подвешенными
теплоагрегатами.
В Приложениях
приведено обоснование основных положений и методов расчета. Приведен пример расчета
типового каркасного сооружения ТЭС с подвешенным котлом.
Предназначены для инженерно-технических работников проектных и
научно-исследовательских институтов.
ПРЕДИСЛОВИЕ
Рекомендации
составлены в развитие СНиП II-7-81 с целью практического использования методов
расчета различного типа гражданских, промышленных и энергетических сооружений с
тяжелыми подвешенными массами на сейсмические воздействия.
Рекомендации
разработаны в развитие "Рекомендаций по определению сейсмической нагрузки
для сооружений с учетом пространственного характера воздействия и работы
конструкций".
Рекомендации
предназначены для использования в проектной практике при расчете гражданских
зданий с подвешенными этажами; промышленных сооружений с тяжелым подвешенным
технологическим оборудованием, энергетических сооружений с подвешенными
теплоагрегатами, с тяжелым, провисающим через несколько этажей оборудованием и
т.д.
Приводится алгоритм
расчета по определению сейсмической нагрузки с учетом пространственного
характера воздействия и работы конструкций сооружений с подвешенными массами.
Даны рекомендации по выбору расчетной динамической модели сооружения с
подвешенными массами и определению ее параметров. Приведены алгоритмы расчета
режима свободных колебаний упругогравитационных систем; определения расчетных
параметров сейсмического воздействия; расчета вынужденных колебаний сооружения
по выбранным моделям воздействия.
В Приложениях
приведен пример расчета типового каркасного сооружения ТЭС с подвешенным
котлом.
Изложены основные
положения расчета по определению сейсмической нагрузки на сооружения с
подвешенными массами с учетом пространственного характера внешнего воздействия
и работы конструкций.
Рекомендации разработаны
в Отделе сейсмостойкости сооружений ЦНИИСК им. В.А. Кучеренко (основной текст -
канд. техн. наук Ю.П. Назаров при научном руководстве д-ра техн. наук проф.
Н.А. Николаенко, Приложения - инженеры Ю.А. Пак и А.Ш. Ревишвили, кандидаты
техн. наук А.Т. Штоль и Г.В. Мамаева).
1. ОБЩИЕ
ПОЛОЖЕНИЯ
1.1. Настоящие
Рекомендации составлены в развитие действующих норм по сейсмостойкому
строительству и посвящены расчету различного типа гражданских и промышленных
сооружений с тяжелыми подвешенными массами на сейсмические воздействия.
Основные положения норм определяют принципиальную сторону расчета сооружений на
сейсмические воздействия, не рассматривая специфику отдельных вопросов.
Конкретизация различных положений расчета сооружений на сейсмические воздействия
выполняется в соответствующей инструктивной литературе в зависимости от типа
рассматриваемых конструкций (металлические, железобетонные), специфики работы
материала конструкций (упругая или неупругая стадия работы), специфики динамики
сооружения, свойств сейсмического воздействия и т.д.
1.2. Настоящие Рекомендации разработаны в развитие "Рекомендаций по
определению сейсмической нагрузки на сооружения с учетом пространственного
характера воздействия и работы конструкций" применительно к определению
сейсмической нагрузки для сооружений, несущих тяжелые подвешенные массы, к
которым относятся: гражданские здания с подвешенными этажами; промышленные
сооружения с тяжелым подвешенным технологическим оборудованием;
энергетические сооружения тепловых и атомных электростанций с подвешенными теплоагрегатами и с тяжелым, провисающим через
несколько этажей оборудованием и т.д. Сооружения с подвешенными массами
представляют упругогравитационные динамические системы, движения (колебания)
которых при сейсмических воздействиях происходят под действием
восстанавливающих сил упругого и гравитационного полей. Методы расчета
колебаний упругогравитационных систем при сейсмических воздействиях обладают
определенной спецификой, включающей в себя:
- особенности
расчета режима свободных колебаний упругогравитационных систем;
- особенности
фильтрации сейсмического воздействия упругогравитационной системой при расчете
режима вынужденных колебаний.
В данных
Рекомендациях учитывается пространственный характер работы сооружений и
волновой пространственный характер сейсмического воздействия.
1.3. Расчетные,
динамические модели сооружений, принятые в Рекомендациях, представляют единые
пространственные упругогравитационные системы, состоящие из совокупности
твердых тел. Методы расчета таких систем используют аппарат динамики систем
твердых тел. Для описания многомерных динамических процессов в таких системах
требуется привлечение аппарата векторного, тензорного анализа и матричного
исчисления.
1.4. Расчетными
динамическими моделями сейсмического воздействия являются фрагменты поля
движений грунта в основании сооружения при землетрясениях. Принятые в расчет
поля сейсмических движений грунта содержат дилатационную (безвихревую) и
ротационную (вихревую) составляющие, что соответствует движению грунта в S- и
L-фазах землетрясения при распространении соответствующих спектров поперечных
S- и поверхностных L-волн, когда происходит максимальное высвобождение энергии
землетрясения и наблюдаются максимальные повреждения и разрушения сооружений.
Результирующие такого фрагмента поля движений грунта в основании сооружения
определяют трехкомпонентные векторы сейсмического воздействия: ускорения
поступательного движения - ![]() ; углового
ускорения вращения -
; углового
ускорения вращения - ![]() и углов вращения -
и углов вращения - ![]() .
Вектор ускорения поступательного движения грунта определяется как поток
дилатационной составляющей поля через объем рассматриваемого фрагмента.
Компоненты векторов углов и угловых ускорений вращения определяются на
основании теоремы Стокса как циркуляции вихревой составляющей поля движений
грунта по заданным контурам рассматриваемого фрагмента. Эти положения
использованы при обработке записей движений грунта во время землетрясения. В Рекомендациях
даны только окончательные результаты такой обработки в виде элементарных
зависимостей.
.
Вектор ускорения поступательного движения грунта определяется как поток
дилатационной составляющей поля через объем рассматриваемого фрагмента.
Компоненты векторов углов и угловых ускорений вращения определяются на
основании теоремы Стокса как циркуляции вихревой составляющей поля движений
грунта по заданным контурам рассматриваемого фрагмента. Эти положения
использованы при обработке записей движений грунта во время землетрясения. В Рекомендациях
даны только окончательные результаты такой обработки в виде элементарных
зависимостей.
1.5. Частично
материал настоящих Рекомендаций использован в "Рекомендациях по расчету на
сейсмические воздействия инженерного и встроенного технологического оборудования"
(М., ЦНИИСК им. В.А. Кучеренко), в "Руководящем техническом материале.
Котлы паровые стационарные. Нормы расчета на прочность при сейсмическом
воздействии". Л., 1986 (см. приложение 4 "Метод определения
сейсмических нагрузок на котлы подвешенного типа при учете пространственного
характера работы конструкций и воздействия"). Все перечисленные
нормативные и инструктивные документы (включая настоящие Рекомендации)
представляют собой единый комплекс документов, дополняющих и развивающих друг
друга. Перед применением данных Рекомендаций целесообразно ознакомиться с
"Рекомендациями по определению сейсмической нагрузки на сооружения с
учетом пространственного характера воздействия и работы конструкций",
которые более просты и отдельные вопросы в них изложены более подробно.
1.6. Решение задач
динамики пространственных систем, рассматриваемых в настоящих Рекомендациях,
связано с обработкой больших массивов чисел. В рекомендуемых методах
рассмотрены вопросы вычисления и обработки таких массивов чисел в виде
различной формы таблиц. Обработку этих массивов (таблиц) чисел целесообразно
выполнять на ЭВМ. Применение ЭВМ возможно в двух формах:
- поэтапное
применение ЭВМ для выполнения отдельных этапов расчета, с целью формирования
отдельных матриц (массивов - таблиц) и их обработки, для выполнения таких
отдельных этапов расчета следует применять известные алгоритмы, программы,
имеющиеся в распоряжении расчетчика;
- объединение
отдельных этапов в единый комплекс и разработка автоматизированной системы
расчета; в настоящее время завершена разработка автоматизированной системы
расчета сооружений как упругих пространственных систем без учета гравитационных
составляющих восстанавливающих сил по материалам "Рекомендаций по
определению сейсмической нагрузки на сооружения с учетом пространственного
характера воздействия и работы конструкций". Наличие такой
автоматизированной системы расчета позволяет с некоторым упрощением выполнить
расчет рассматриваемых в настоящих Рекомендациях сооружений.
2. АЛГОРИТМ
РАСЧЕТА ПО ОПРЕДЕЛЕНИЮ СЕЙСМИЧЕСКОЙ НАГРУЗКИ
С УЧЕТОМ
ПРОСТРАНСТВЕННОГО ХАРАКТЕРА ВОЗДЕЙСТВИЯ
И РАБОТЫ
КОНСТРУКЦИЙ СООРУЖЕНИЙ С ПОДВЕШЕННЫМИ МАССАМИ
2.1. В настоящих
Рекомендациях рассматривается алгоритм расчета по определению сейсмической
нагрузки для сооружений с подвешенными массами в наиболее простом варианте -
без учета любых корреляций и при компонентном способе представления информации
о сейсмическом воздействии. Алгоритм состоит из следующих основных разделов:
- выбор и
определение параметров расчетной динамической модели сооружения с подвешенными
массами;
- формирование
матриц жесткости и податливости для системы в целом и определение единичных
усилий в элементах конструкций;
- расчет режима
свободных колебаний;
- определение
расчетных параметров векторов сейсмического воздействия ![]() ,
, ![]() и
и ![]() ;
;
- расчет режима
вынужденных колебаний;
- определение
расчетных значений внутренних усилий в поперечных сечениях несущих конструкций
сооружения с подвешенными массами.
Выбор
расчетной динамической модели сооружения
с подвешенными
массами и определение ее параметров
2.2. В
основу расчета положены дискретные расчетные динамические модели, которые
формируются для сооружений с подвешенными массами, исходя из следующих
положений:
- конструкции
сооружения (перекрытия, отдельные конструктивные части, подвешенные массы и
т.д.), жесткость которых на порядок больше жесткости других конструкций,
считаются абсолютно твердыми;
- оставшиеся
конструкции сооружения (элементы каркаса, подвески, несущие массы, ядра и
диафрагмы жесткости, диафрагмы лестничных клеток и т.п.) считаются упругими
связями между твердыми частями с линейными диаграммами деформирования.
2.3. Масса
сооружения в динамических моделях распределяется по абсолютно твердым частям, а
другие конструкции считаются невесомыми и их масса относится к соответствующим твердым
телам, т.е. динамическая модель представляется в виде отдельных (дискретных)
абсолютно твердых тел, соединенных несущими невесомыми упругими элементами.
Фундамент
сооружения в расчетной динамической модели принимается жестким и моделируется
твердым телом.
Массы в дискретной
динамической модели могут быть представлены в следующем виде:
- материальная
точка, которая может иметь максимум три степени свободы и характеризуется
только величиной массы m..., где... - номер массы;
- твердый диск,
имеющий три степени свободы и учитывающий геометрию распределения масс и
упругих связей в плоскости диска, диск характеризуется величиной массы m... и
центральным моментом инерции ![]() относительно оси, перпендикулярной плоскости
диска;
относительно оси, перпендикулярной плоскости
диска;
- твердое тело,
имеющее шесть степеней свободы и учитывающее геометрию распределения масс и
упругих связей в пространстве. Инерционные параметры тела характеризуются
величиной массы m... и тензором инерции масс ![]() относительно каких-либо осей. В расчетах в
качестве таких осей следует принимать главные и центральные оси инерции тела,
для которых тензор инерции
относительно каких-либо осей. В расчетах в
качестве таких осей следует принимать главные и центральные оси инерции тела,
для которых тензор инерции ![]() имеет вид диагональной матрицы с отличными от
нуля только осевыми моментами инерции масс
имеет вид диагональной матрицы с отличными от
нуля только осевыми моментами инерции масс ![]() (i = 1, 2, 3, ... - номер массы).
(i = 1, 2, 3, ... - номер массы).
Величины масс m...
определяются в соответствии с требованиями учета нагрузок, приведенными в п.
2.1 СНиП II-7-81. Осевые моменты инерции масс ![]() вычисляются по справочным данным.
вычисляются по справочным данным.
2.4.
Материал несущих конструкций сооружения (деформируемые связи) принимается упругим с линейной диаграммой деформирования. Модели этих
конструкций (элементы каркаса, панели, диафрагмы и т.д.) определяются:
- видом
представления массы; если масса представлена точкой, то все конструкции,
несущие такую массу, моделируются только условным стержнем, жесткость которого
отражает суммарную жесткость всех несущих конструкций; для твердых диска и тела
можно учитывать отдельно каждую конструкцию с ее геометрией расположения в
сооружении и собственной геометрией;
- моделями упругих
связей в статических расчетах при формировании матриц жесткости или
податливости.
2.5.
Описание геометрии расчетной динамической модели выполняется введением систем
отсчета, связанных с массами, и определением связи между ними.
Вводится
инерциальная система осей ![]() без привязки ее начала. В качестве этих осей
может быть принята ориентация по сторонам света или какая-либо другая местная
система трех ортогональных направлений.
без привязки ее начала. В качестве этих осей
может быть принята ориентация по сторонам света или какая-либо другая местная
система трех ортогональных направлений.
Вводится система
отсчета ![]() ,
связанная с подвижным основанием (фундаментом), движение которого определяется
моделью сейсмического воздействия. Рекомендуется оси
,
связанная с подвижным основанием (фундаментом), движение которого определяется
моделью сейсмического воздействия. Рекомендуется оси ![]() совмещать с основными осями сооружения.
совмещать с основными осями сооружения.
Взаимосвязь между
введенными системами осей ![]() и
и ![]() устанавливается матрицей
устанавливается матрицей ![]() ,
имеющей следующий вид:
,
имеющей следующий вид:
 , (1)
, (1)где ![]() - скалярные произведения единичных векторов
- скалярные произведения единичных векторов ![]() и
и ![]() (орты осей
(орты осей ![]() и
и ![]() );
точкой отмечен знак скалярного произведения, поэтому
);
точкой отмечен знак скалярного произведения, поэтому ![]() являются тригонометрическими функциями углов
между осями
являются тригонометрическими функциями углов
между осями ![]() и
и ![]() .
.
Произвольно
устанавливается нумерация всех инерционных элементов (материальных точек,
дисков и тел) расчетной динамической модели сооружения. Нумерация всех несущих
элементов (масс) выполняется цифрами - I, II, ..., n. Нумерация всех масс,
подвешенных к k-му элементу модели, выполняется цифрами с соответствующими
индексами - ![]() ,
, ![]() , ...,
, ..., ![]() ...,
..., ![]() . Общее
число масс в динамической модели равно
. Общее
число масс в динамической модели равно ![]() .
.
С каждой несущей
или подвешенной массой неизменно связывается своя система осей ![]() (k = I, II, ..., n) или
(k = I, II, ..., n) или ![]()
![]() соответственно. Для дисков и тел эти оси
должны быть главными и центральными осями инерции.
соответственно. Для дисков и тел эти оси
должны быть главными и центральными осями инерции.
Взаимосвязь между
введенными системами осей ![]() или
или ![]() и
и ![]() устанавливается с помощью матриц
устанавливается с помощью матриц ![]() или
или ![]() ,
аналогичных (1) по своей структуре:
,
аналогичных (1) по своей структуре:
где ![]() ,
, ![]() - скалярные произведения единичных векторов
- скалярные произведения единичных векторов ![]() ,
, ![]() и
и ![]() (орт осей
(орт осей ![]() ,
, ![]() и
и ![]() )
соответственно.
)
соответственно.
Компоненты матриц
(2) и (3) вычисляются аналогично компонентам (1).
Векторами ![]() и
и ![]() (n = 1, 2, 3) определяются положения начал
отсчета систем осей
(n = 1, 2, 3) определяются положения начал
отсчета систем осей ![]() и
и ![]() в осях
в осях ![]() , где
, где ![]() и
и ![]() - координаты центра масс k-го несущего и
- координаты центра масс k-го несущего и ![]() -го
подвешенного элемента.
-го
подвешенного элемента.
Описание
упругих свойств расчетной динамической модели
сооружения с
подвешенными массами
2.6.
Упругие свойства динамической модели сооружения с подвешенными массами
определяются матрицей жесткости ![]() или податливости
или податливости ![]() .
Рассчитываются
.
Рассчитываются ![]() или
или ![]() по любым известным методам строительной
механики. Для формирования
по любым известным методам строительной
механики. Для формирования ![]() или
или ![]() следует использовать известные алгоритмы и
программы статического расчета упругих систем на ЭВМ.
следует использовать известные алгоритмы и
программы статического расчета упругих систем на ЭВМ.
2.7. При выполнении расчета упругой системы по методу сил (формирование
матрицы податливости ![]() ) в
центрах масс динамической модели, по направлению осей, связанных с этими
массами (или относительно данных осей), последовательно прикладываются
единичные силы P... = 1 (или M... = 1), где... - индекс (номер) силы или
момента, от последовательного действия каждой единичной силы или момента
выполняется статический расчет упругой системы, соответствующей рассматриваемой
динамической модели.
) в
центрах масс динамической модели, по направлению осей, связанных с этими
массами (или относительно данных осей), последовательно прикладываются
единичные силы P... = 1 (или M... = 1), где... - индекс (номер) силы или
момента, от последовательного действия каждой единичной силы или момента
выполняется статический расчет упругой системы, соответствующей рассматриваемой
динамической модели.
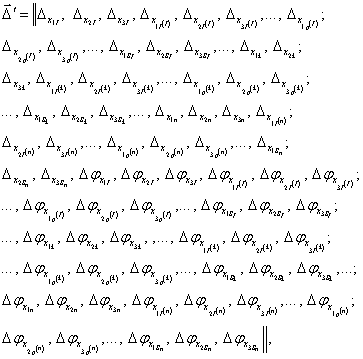
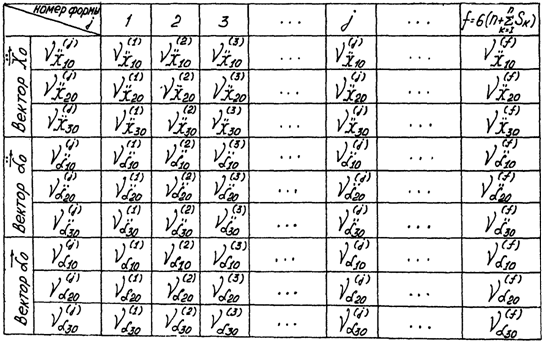
Структура полного
вектора единичной нагрузки для такого расчета имеет вид:
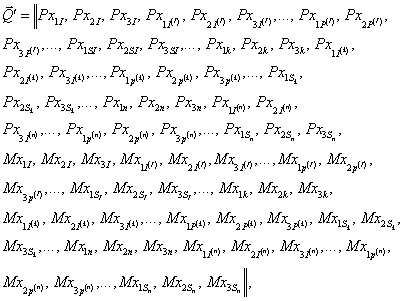
где ![]() и
и ![]() - единичные силы, прикладываемые к центрам
масс k-го (k = I, II, ..., n) и
- единичные силы, прикладываемые к центрам
масс k-го (k = I, II, ..., n) и ![]() -го
-го
![]() тел по направлению i-ых (i = 1, 2, 3) осей
системы отсчета
тел по направлению i-ых (i = 1, 2, 3) осей
системы отсчета ![]() ,
связанной с основанием;
,
связанной с основанием;
![]() и
и ![]() - единичные моменты, прикладываемые
относительно i-ых осей системы отсчета
- единичные моменты, прикладываемые
относительно i-ых осей системы отсчета ![]() и
и ![]() .
.
Вектор единичной
нагрузки ![]() содержит
содержит ![]() сил и
сил и ![]() моментов. Порядок
моментов. Порядок ![]() равен
равен ![]() .
.
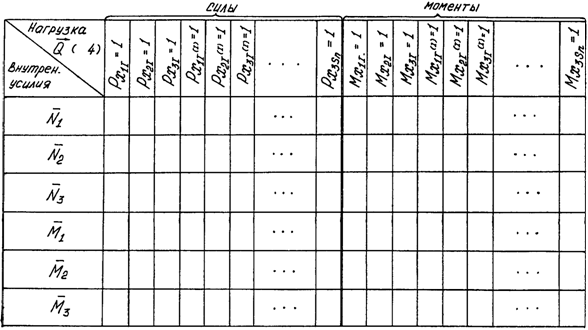
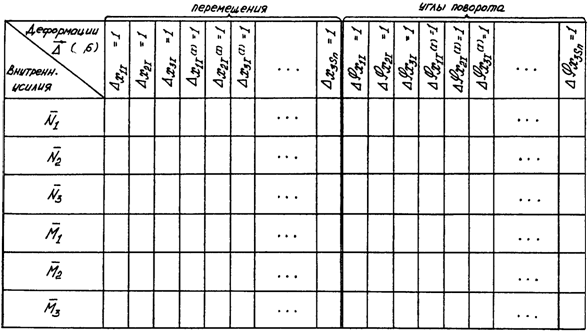
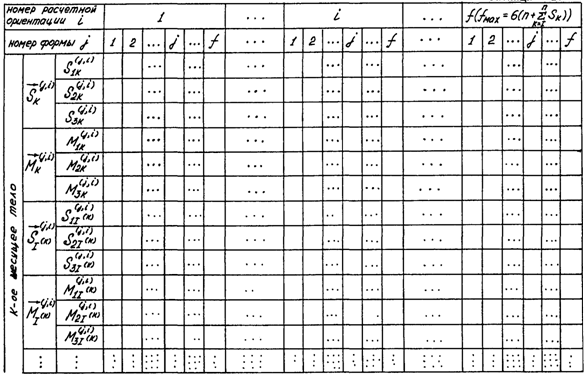
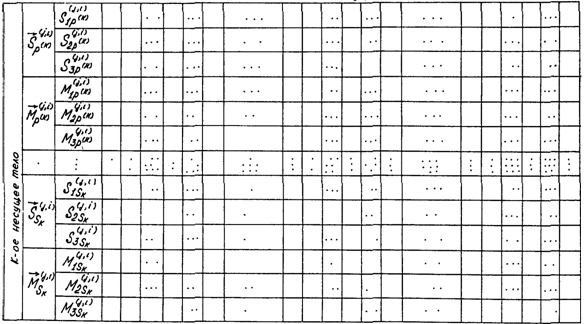
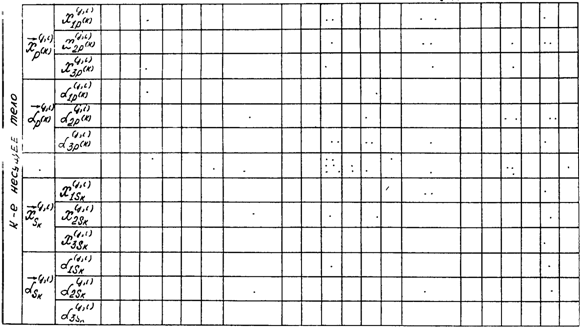
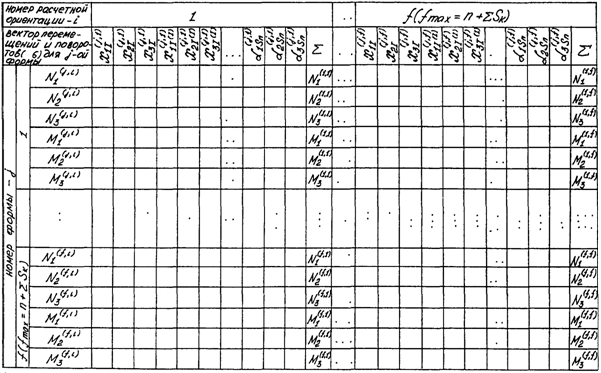
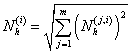
При таком расчете
отдельно от действия каждой единичной силы и каждого единичного момента вектора
![]() (4) для поперечных сечений упругих элементов
(колонны и ригели каркаса, подвески масс и т.д.), прочность которых проверяется
на сейсмические воздействия, определяются внутренние усилия. Результаты этого
расчета сводятся в табл. 1.
(4) для поперечных сечений упругих элементов
(колонны и ригели каркаса, подвески масс и т.д.), прочность которых проверяется
на сейсмические воздействия, определяются внутренние усилия. Результаты этого
расчета сводятся в табл. 1.
Отдельно от
действия каждой единичной силы и каждого единичного момента вектора ![]() (4) определяются также перемещения центров
масс динамической модели по направлениям осей отсчета
(4) определяются также перемещения центров
масс динамической модели по направлениям осей отсчета ![]() и углы поворота этих масс относительно данных
осей
и углы поворота этих масс относительно данных
осей ![]() и
и ![]() . От
отдельного действия каждой единичной силы или единичного момента такие
перемещения составляют полный вектор единичных перемещений и углов вращения в
виде:
. От
отдельного действия каждой единичной силы или единичного момента такие
перемещения составляют полный вектор единичных перемещений и углов вращения в
виде:
где ![]() и
и ![]() - единичные перемещения центров масс k-го (k =
I, II, ..., n) и
- единичные перемещения центров масс k-го (k =
I, II, ..., n) и ![]() -го
-го
![]() тел в направлении i-ой (i = 1, 2, 3) оси
системы отсчета
тел в направлении i-ой (i = 1, 2, 3) оси
системы отсчета ![]() ,
связанной с основанием;
,
связанной с основанием;
![]() и
и ![]() - углы поворотов k-го и
- углы поворотов k-го и ![]() -го
тел относительно i-ой оси систем отсчета
-го
тел относительно i-ой оси систем отсчета ![]() и
и ![]() ; при t
= 1 перемещения и углы поворота определяются от единичных сил, а при t = 2 - от
единичных моментов вектора
; при t
= 1 перемещения и углы поворота определяются от единичных сил, а при t = 2 - от
единичных моментов вектора ![]() (4).
(4).
Вектор ![]() (5) содержит
(5) содержит ![]() перемещений и
перемещений и ![]() углов поворота. Полный порядок
углов поворота. Полный порядок ![]() равен
равен ![]() .
.
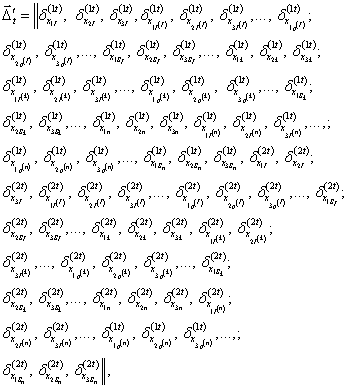
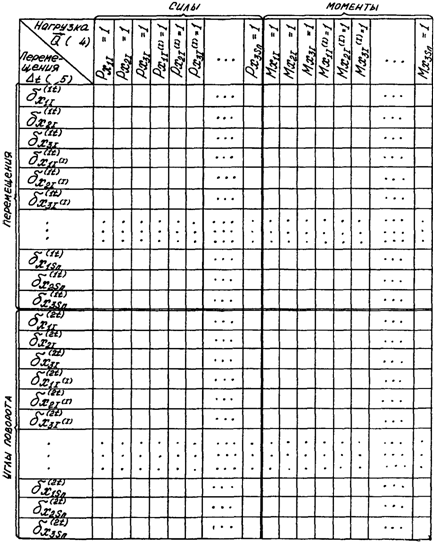
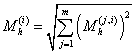
Для каждой
единичной силы и каждого единичного момента вектора ![]() (4) вычисляется свой вектор
(4) вычисляется свой вектор ![]() (5). Число векторов
(5). Число векторов ![]() равно полному порядку вектора
равно полному порядку вектора ![]() -
- ![]() . Эта
совокупность векторов
. Эта
совокупность векторов ![]() образует матрицу податливости всей системы
образует матрицу податливости всей системы ![]() ,
которая сводится в табл. 2.
,
которая сводится в табл. 2.
2.8. При
выполнении расчетов упругой системы по методу деформаций (формирование матрицы
жесткости ![]() ) в
центрах масс динамической модели по направлению принятых осей отсчета (или
относительно их) накладываются связи, которым последовательно сообщаются
единичные перемещения
) в
центрах масс динамической модели по направлению принятых осей отсчета (или
относительно их) накладываются связи, которым последовательно сообщаются
единичные перемещения ![]() (или единичные углы поворота
(или единичные углы поворота ![]() ),
где... - индекс (номер) связи. От последовательного действия единичных
перемещений и углов поворота выполняется статический расчет упругой системы,
соответствующей рассматриваемой динамической модели.
),
где... - индекс (номер) связи. От последовательного действия единичных
перемещений и углов поворота выполняется статический расчет упругой системы,
соответствующей рассматриваемой динамической модели.
Структура полного
вектора единичных перемещений, от которых выполняется расчет, имеет вид:
где ![]() и
и ![]() - единичные перемещения центров масс k-го тела
(k = I, II, ..., n) и
- единичные перемещения центров масс k-го тела
(k = I, II, ..., n) и ![]() -го
тела
-го
тела ![]() в направлении i-ых (i = 1, 2, 3) осей системы
отсчета
в направлении i-ых (i = 1, 2, 3) осей системы
отсчета ![]() ,
связанной с основанием;
,
связанной с основанием;
![]() и
и ![]() - единичные углы поворота относительно i-ых
осей систем отсчета
- единичные углы поворота относительно i-ых
осей систем отсчета ![]() и
и ![]() .
.
Вектор единичных
перемещений ![]() (6) содержит
(6) содержит ![]() перемещений и
перемещений и ![]() углов поворота. Полный порядок
углов поворота. Полный порядок ![]() равен
равен ![]() .
.
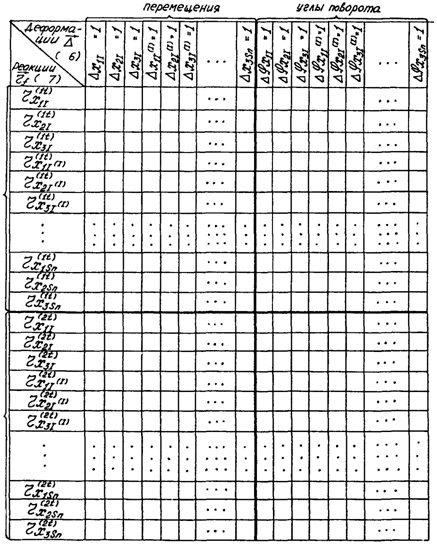
При расчете упругой
системы по методу деформаций отдельно от каждого единичного перемещения и
каждого единичного поворота вектора ![]() (6) для поперечных сечений упругих элементов,
моделирующих несущие конструкции сооружения, прочность которых проверяется на
сейсмические воздействия, определяются внутренние усилия. В результате
определяется столько напряженно-деформированных состояний, каков порядок
вектора
(6) для поперечных сечений упругих элементов,
моделирующих несущие конструкции сооружения, прочность которых проверяется на
сейсмические воздействия, определяются внутренние усилия. В результате
определяется столько напряженно-деформированных состояний, каков порядок
вектора ![]() (6), т.е.
(6), т.е. ![]() .
Результаты такого расчета сводятся в табл. 3.
.
Результаты такого расчета сводятся в табл. 3.
Отдельно от
действия каждого единичного перемещения или угла поворота вектора ![]() (6) вычисляются реакции во всех наложенных на
систему связях. При каждом отдельном расчете эти реакции образуют вектор в
виде:
(6) вычисляются реакции во всех наложенных на
систему связях. При каждом отдельном расчете эти реакции образуют вектор в
виде:
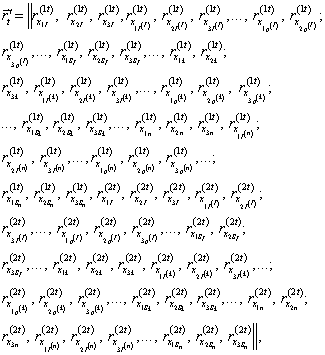
где ![]() и
и ![]() - единичные силы реакции в связях, наложенных
на центр масс k-го тела (k = I, II, ..., n) и
- единичные силы реакции в связях, наложенных
на центр масс k-го тела (k = I, II, ..., n) и ![]() -го
тела
-го
тела ![]() по направлению i-ых осей (i = 1, 2, 3) систем
отсчета, связанных с этими телами;
по направлению i-ых осей (i = 1, 2, 3) систем
отсчета, связанных с этими телами;
![]() и
и ![]() - единичные моменты реакции в связях,
наложенных относительно i-ых осей тех же систем отсчета; при t = 1 реакции (7)
вычисляются от действия перемещений, а при t = 2 - от углов поворота.
- единичные моменты реакции в связях,
наложенных относительно i-ых осей тех же систем отсчета; при t = 1 реакции (7)
вычисляются от действия перемещений, а при t = 2 - от углов поворота.
Вектор ![]() (7) содержит
(7) содержит ![]() сил реакций и
сил реакций и ![]() моментов реакций. Полный порядок
моментов реакций. Полный порядок ![]() (7) равен
(7) равен ![]() .
.
Для каждого
единичного перемещения и каждого единичного поворота вектора ![]() (6) вычисляется свой вектор
(6) вычисляется свой вектор ![]() (7). Число рассчитываемых векторов
(7). Число рассчитываемых векторов ![]() равно полному порядку вектора
равно полному порядку вектора ![]() . Эта
совокупность векторов
. Эта
совокупность векторов ![]() образует матрицу жесткости всей системы
образует матрицу жесткости всей системы ![]() ,
которая сводится в табл. 4.
,
которая сводится в табл. 4.
Расчет
режима свободных колебаний
упругогравитационных
систем
2.9.
Составляется диагональная матрица инерционных параметров рассматриваемой
динамической системы [M] с размерностью ![]() x
x ![]() , все
элементы которой, кроме главной диагонали, равны нулю. Главная диагональ этой
матрицы в виде вектора
, все
элементы которой, кроме главной диагонали, равны нулю. Главная диагональ этой
матрицы в виде вектора ![]() определяется следующим образом:
определяется следующим образом:
где ![]()
![]() и
и ![]()
![]() - масса и i-ый (i = 1, 2, 3) осевой момент
инерции массы k-го несущего (
- масса и i-ый (i = 1, 2, 3) осевой момент
инерции массы k-го несущего (![]() -го
подвешенного) тела (k = I, II, ..., n;
-го
подвешенного) тела (k = I, II, ..., n; ![]() ).
).
В диагонали [M] (8)
величины масс и моментов инерции масс определяются в соответствии с
требованиями 2.3 настоящих Рекомендаций.
Диагональ [M] (8)
записана для общего случая, когда каждая масса, в соответствии с 2.3 данных
Рекомендаций, представляется в виде твердого тела с шестью степенями свободы:
три поступательных движения и три вращения. Поэтому в (8) для каждой массы
записано шесть соответствующих инерционных параметров. Если согласно 2.3 масса
принимается в виде точки или твердого диска, то из (8) должны быть исключены
параметры, соответствующие исключенным степеням свободы.
2.10.
Составляется матрица гравитационных добавок [H] к матрице жесткости системы ![]() .
Размерность матрицы [H] так же, как и
.
Размерность матрицы [H] так же, как и ![]() -
- ![]() x
x ![]() .
.
Вычисляются частоты
парциальных колебаний всех подвешенных масс по следующей формуле:
 , (9)
, (9)где g - ускорение
силы тяжести;
![]() - (условная длина подвески) расстояние между
условной точкой подвеса к k-му телу и центром масс
- (условная длина подвески) расстояние между
условной точкой подвеса к k-му телу и центром масс ![]() -го
подвешенного тела (k = I, II, ..., n;
-го
подвешенного тела (k = I, II, ..., n; ![]() ) в
вертикальном направлении (в направлении вертикальной оси инерциальной системы
отсчета
) в
вертикальном направлении (в направлении вертикальной оси инерциальной системы
отсчета ![]() ,
вводимой в расчет согласно п. 2.5 настоящих Рекомендаций).
,
вводимой в расчет согласно п. 2.5 настоящих Рекомендаций).
Вычисляются матрицы
констант ![]() ,
характеризующих геометрию подвешивания масс
,
характеризующих геометрию подвешивания масс
В общем случае
компоненты матрицы ![]() равны:
равны:
где ![]() и
и ![]() ;
; ![]() и
и ![]() - расстояния между условной точкой подвеса к
k-му несущему телу и центром масс
- расстояния между условной точкой подвеса к
k-му несущему телу и центром масс ![]() -го
подвешенного тела в направлении горизонтальных осей
-го
подвешенного тела в направлении горизонтальных осей ![]() и
и ![]() инерциальной системы отсчета
инерциальной системы отсчета ![]() ,
введенной в расчет по 2.5 настоящих Рекомендаций.
,
введенной в расчет по 2.5 настоящих Рекомендаций.
В частном случае,
если центры масс несущего k-го и подвешенного к нему ![]() -го
тел расположены по одной вертикали и
-го
тел расположены по одной вертикали и ![]() , то
, то ![]() , а компоненты
матрицы
, а компоненты
матрицы ![]() (10) по (11) равны
(10) по (11) равны
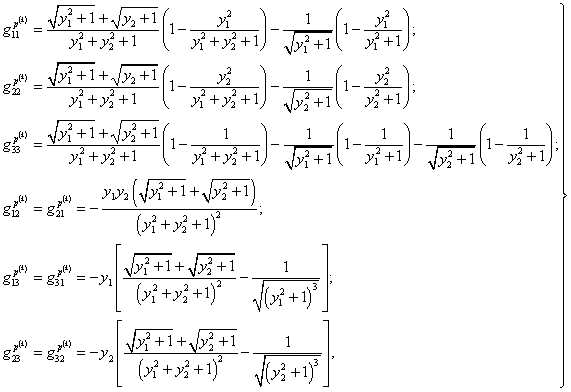
Для каждой
подвешенной массы вычисляются составляющие матрицы [H] по следующим формулам:
где ' (штрих) -
знак транспонирования;
![]() (1) и
(1) и ![]() (2) - матрицы, введенные в 2.5 настоящих
Рекомендаций для преобразования систем отсчета.
(2) - матрицы, введенные в 2.5 настоящих
Рекомендаций для преобразования систем отсчета.
Здесь ![]() - кососимметричная матрица, имеющая вид:
- кососимметричная матрица, имеющая вид:
 , (15)
, (15)где ![]() (i = 1, 2, 3) - координаты условной точки
подвеса
(i = 1, 2, 3) - координаты условной точки
подвеса ![]() массы к k-му телу в осях
массы к k-му телу в осях ![]() ,
введенных в расчет в п. 2.5 настоящих Рекомендаций.
,
введенных в расчет в п. 2.5 настоящих Рекомендаций.
В качестве условной
точки подвеса следует принимать вертикальную проекцию центра масс подвешенного
тела на нижнюю поверхность k-го несущего тела. Тогда ![]() отсчитываются как расстояния между точкой
"k" и вертикальной проекцией точки "
отсчитываются как расстояния между точкой
"k" и вертикальной проекцией точки "![]() "
на нижнюю поверхность k-го тела по направлению осей
"
на нижнюю поверхность k-го тела по направлению осей ![]() (i = 1, 2, 3).
(i = 1, 2, 3).
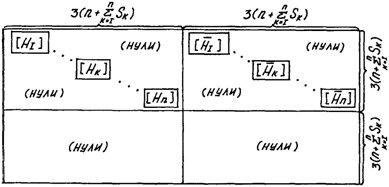
Из составляющих
(13) - (14) формируется матрица гравитационных добавок [H] по форме табл. 5, 5,
а и 5, б.
![]()
![]()
2.11.
Выполняется вспомогательный анализ полных матриц жесткости ![]() или податливости
или податливости ![]() для выявления обособленных составляющих
для выявления обособленных составляющих
где F - число
обособленных составляющих полных матриц ![]() или
или ![]() .
.
Между отдельными
обособленными составляющими ![]() и
и ![]() существует обратная зависимость
существует обратная зависимость
![]() . (17)
. (17)
При отсутствии
обособленных составляющих эта обратная зависимость имеет место для полных
матриц ![]() и
и ![]()
2.12.
Вычисляется полная матрица коэффициентов следующего вида:
![]() , (19)
, (19)
где ![]() - матрица, обратная матрице инерционных
параметров системы [M], составленной в соответствии с требованиями п. 2.9
настоящих Рекомендаций.
- матрица, обратная матрице инерционных
параметров системы [M], составленной в соответствии с требованиями п. 2.9
настоящих Рекомендаций.
2.13.
Анализируется полная матрица коэффициентов [A] для выявления обособленных
составляющих
где N - число
обособленных составляющих матрицы [A].
Анализ
обособленности матрицы [A] (20) выполняется с учетом вспомогательного анализа
обособленности матриц ![]() или
или ![]() по (16).
по (16).
Каждая обособленная
матрица коэффициентов ![]() описывает свою самостоятельную и независимую
группу пространственных колебаний рассматриваемой системы. Если обособленные
составляющие
описывает свою самостоятельную и независимую
группу пространственных колебаний рассматриваемой системы. Если обособленные
составляющие ![]() отсутствуют, то все колебания в пространстве
линейно взаимосвязаны.
отсутствуют, то все колебания в пространстве
линейно взаимосвязаны.
2.14.
Отдельно для каждой обособленной составляющей коэффициентов ![]() (если они имеются) решается задача на
собственные значения (собственные числа и векторы) по частотным уравнениям в
прямой или обратной форме.
(если они имеются) решается задача на
собственные значения (собственные числа и векторы) по частотным уравнениям в
прямой или обратной форме.
Для полной матрицы
коэффициентов [A] эти уравнения имеют следующий вид:
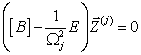 , (22)
, (22)где
![]() . (23)
. (23)
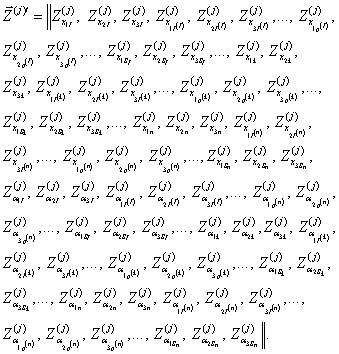
Здесь ![]() - блочный вектор коэффициентов j-ой
пространственной формы упругогравитационных колебаний порядком
- блочный вектор коэффициентов j-ой
пространственной формы упругогравитационных колебаний порядком ![]() ,
структура которого соответствует структуре векторов (4) - (7):
,
структура которого соответствует структуре векторов (4) - (7):
При решении
задачи (21) по матрице [A] определяются ее собственные числа в виде ![]() (
(![]() -
частота j-ой формы колебаний), а при решении обратной задачи по (22) по матрице
[B] - собственные значения -
-
частота j-ой формы колебаний), а при решении обратной задачи по (22) по матрице
[B] - собственные значения - ![]() . В
обоих случаях число собственных значений
. В
обоих случаях число собственных значений ![]() (или
(или ![]() ) и
собственных векторов
) и
собственных векторов ![]() равно порядку матриц [A] или [B], т.е. для
полных матриц [A] (или [B]), в общем случае для масс в виде твердых тел (см. п. 2.3 настоящих Рекомендаций),
равно порядку матриц [A] или [B], т.е. для
полных матриц [A] (или [B]), в общем случае для масс в виде твердых тел (см. п. 2.3 настоящих Рекомендаций), ![]() .
.
Для каждой из
обособленных составляющих ![]() или
или ![]() задача по расчету собственных частот и
векторов коэффициентов форм самостоятельной i-ой группы колебаний решается
аналогично. При этом необходимо учитывать, что:
задача по расчету собственных частот и
векторов коэффициентов форм самостоятельной i-ой группы колебаний решается
аналогично. При этом необходимо учитывать, что:
- структура вектора
коэффициентов форм колебаний соответствует структуре обособленной составляющей
матриц ![]() (или
(или ![]() );
);
- порядок вектора
коэффициентов форм колебаний равен порядку обособленной составляющей ![]() (или
(или ![]() );
);
- число собственных
значений ![]() (или
(или ![]() ) и
число собственных векторов равно порядку исходных обособленных составляющих
) и
число собственных векторов равно порядку исходных обособленных составляющих ![]() (или
(или ![]() );
);
- суммарное число
всех собственных значений и всех собственных векторов равно суммарному порядку
всех обособленных составляющих ![]() (или
(или ![]() ), т.е.
оно равно порядку исходной матрицы [A] и в общем случае это число равно
), т.е.
оно равно порядку исходной матрицы [A] и в общем случае это число равно ![]() .
.
2.15.
Отдельно для каждой обособленной группы колебаний (если имеются обособленные
составляющие ![]() )
выполняется нормировка коэффициентов форм колебаний по отношению к какому-либо
одному коэффициенту, принимаемому за единицу.
)
выполняется нормировка коэффициентов форм колебаний по отношению к какому-либо
одному коэффициенту, принимаемому за единицу.
В общем случае,
когда не имеется обособленных составляющих ![]() , в
качестве такого нормирующего множителя удобно принимать значение коэффициента
перемещения I массы в направлении 1-ой оси
, в
качестве такого нормирующего множителя удобно принимать значение коэффициента
перемещения I массы в направлении 1-ой оси ![]() .
.
Тогда
![]() , (25)
, (25)
где ![]() - нормированный вектор коэффициентов форм
колебаний.
- нормированный вектор коэффициентов форм
колебаний.
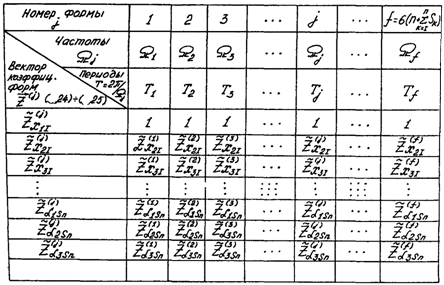
Результаты решения
задачи по определению частот и форм колебаний сводятся в соответствующие
таблицы (табл. 6). Такие таблицы составляются для каждой отдельной группы
колебаний, рассчитанной по соответствующим обособленным составляющим ![]() или
или ![]() .
.
2.16.
Критерием точности решения задач по расчету собственных значений и векторов
является проверка условий ортогональности найденных векторов
коэффициентов форм свободных колебаний, которые имеют вид
При проверке
условий ортогональности определяется матрица [C], компоненты которой ![]() вычисляются по (26). Матрица [C] -
диагональная:
вычисляются по (26). Матрица [C] -
диагональная: ![]() и
и ![]() , где
, где ![]() - приведенная к i-ой форме колебаний масса
всего рассматриваемого сооружения.
- приведенная к i-ой форме колебаний масса
всего рассматриваемого сооружения.
Проверка
условий ортогональности выполняется отдельно для каждой самостоятельной группы
колебаний, определяемой соответствующими обособленными составляющими матрицами
динамических коэффициентов ![]() или
или ![]() . При
этом порядок матрицы [C] по (26) равен порядку исходных матриц
. При
этом порядок матрицы [C] по (26) равен порядку исходных матриц ![]() или
или ![]() . В
случае, когда обособленные составляющие
. В
случае, когда обособленные составляющие ![]() или
или ![]() отсутствуют и все колебания в пространстве
между собой линейно взаимосвязаны, порядок матрицы [C] равен порядку полной
матрицы [A].
отсутствуют и все колебания в пространстве
между собой линейно взаимосвязаны, порядок матрицы [C] равен порядку полной
матрицы [A].
Результаты проверки
условий ортогональности форм для каждой самостоятельной группы колебаний
сводятся в таблицы (табл. 7).
┌───────┬───────┬──────┬──────┬─────────┬───────┬─────────┬──────┐
│
N п/п │
1 │ 2
│ 3 │
... │ j
│ ... │
f │
├───────┼───────┼──────┼──────┼─────────┼───────┼─────────┼──────┤
│ 1
│ M │
0 │ 0
│ ... │
0 │ ...
│ 0 │
│ │
1 │ │ │ │ │ │ │
├───────┼───────┼──────┼──────┼─────────┼───────┼─────────┼──────┤
│ 2
│ 0
│ M │
0 │ ...
│ 0 │
... │ 0
│
│ │ │
2 │ │ │ │ │ │
├───────┼───────┼──────┼──────┼─────────┼───────┼─────────┼──────┤
│ 3
│ 0 │
0 │ M
│ ... │
0 │ ...
│ 0 │
│ │ │ │
3 │ │ │ │ │
├───────┼───────┼──────┼──────┼─────────┼───────┼─────────┼──────┤
│ .
│ . │
. │ .
│ ... │
. │ ...
│ . │
│ .
│ . │
. │ .
│ ... │
. │ ...
│ . │
│ .
│ . │
. │ .
│ ... │
. │ ...
│ . │
├───────┼───────┼──────┼──────┼─────────┼───────┼─────────┼──────┤
│ j
│ 0 │
0 │ 0
│ ... │
М │ ...
│ 0 │
│ │ │ │ │ │ j
│ │ │
├───────┼───────┼──────┼──────┼─────────┼───────┼─────────┼──────┤
│ .
│ . │
. │ .
│ ... │
. │ ...
│ . │
│ .
│ . │
. │ .
│ ... │
. │ ...
│ . │
│ .
│ . │
. │ . │ ...
│ . │
... │ .
│
├───────┼───────┼──────┼──────┼─────────┼───────┼─────────┼──────┤
│ f
│ 0 │
0 │ 0
│ ... │
0 │ ...
│ M │
│ │ │ │ │ │ │ │ f
│
└───────┴───────┴──────┴──────┴─────────┴───────┴─────────┴──────┘
Расчет режима
свободных колебаний необходимо выполнять только на ЭВМ. Весь алгоритм расчета
целесообразно выполнять по структуре программы вычислений, показанной на рис.
1.
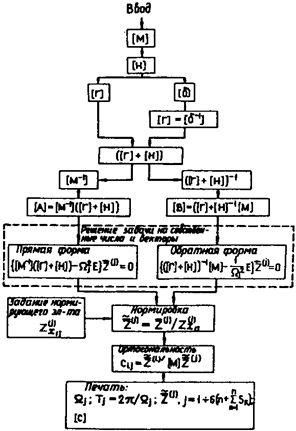
Рис. 1.
Принципиальная схема структуры программы
расчета режима
свободных колебаний
Расчетные
параметры сейсмического воздействия
2.17. В
соответствии с расчетной балльностью площадки строительства по СНиП II-7-81,
определяется независимая от пространственной ориентации (инвариантная)
расчетная интенсивность ускорений поступательного движения грунта в основании
сооружения.
Расчетная интенсивность
ускорений поступательного движения грунта I является функцией от меньшего
размера сооружения в плане B и вычисляется по формуле
где ![]() - ускорение силы тяжести;
- ускорение силы тяжести;
A - коэффициент,
принимаемый равным 0,1; 0,2 и 0,4 для расчетной
сейсмичности 7, 8 и 9 баллов по СНиП II-7-81.
Значение
нормированной аппроксимирующей функции ![]() определяется по графикам рис. 2 или
вычисляется по формуле
определяется по графикам рис. 2 или
вычисляется по формуле
где B (м) >= 25
м - меньший размер сооружения в плане;
a -
аппроксимирующий коэффициент, значение которого равно ![]() ;
; ![]() и
и ![]() (1/м) для I, II и III категории грунта по СНиП
II-7-81.
(1/м) для I, II и III категории грунта по СНиП
II-7-81.
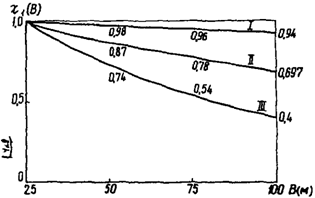
Рис. 2.
Графики нормированных функций ![]()
при ![]() ;
; ![]() и
и ![]() (1/м)
(1/м)
для I, II и III
категории грунтов соответственно
2.18. В
зависимости от категории грунтов по СНиП II-7-81 определяется независимая от
пространственной ориентации (инвариантная) интенсивность угловых ускорений
вращательных движений грунта в основании сооружения (ускорения ротации поля
сейсмических движений). Этот инвариант интенсивности определяется относительной
(по отношению к инварианту поступательного движения) величиной W.
Расчетное значение
относительного инварианта интенсивности углового ускорения
сейсмических движений грунта является функцией от меньшего размера
сооружения в плане B и вычисляется по формуле
где ![]() ;
; ![]() и
и ![]()
![]() для грунтов I, II и III категорий по СНиП
II-7-81.
для грунтов I, II и III категорий по СНиП
II-7-81.
Значение
нормированной аппроксимирующей функции ![]() определяется по графикам рис. 3 или
вычисляется по формуле
определяется по графикам рис. 3 или
вычисляется по формуле
где B >= 25 м -
меньший размер сооружения в плане;
b -
аппроксимирующий коэффициент, значение которого равно ![]() ;
; ![]() и
и ![]() (1/м) для I, II и III категорий грунта по СНиП
II-7-81.
(1/м) для I, II и III категорий грунта по СНиП
II-7-81.
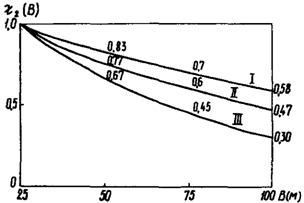
Рис. 3.
Графики нормативных функций ![]()
при ![]() ;
; ![]() и
и ![]() (1/м)
(1/м)
для I, II и III
категорий грунтов соответственно
2.19. В
зависимости от категории грунтов по СНиП II-7-81 определяется независимая от
пространственной ориентации (инвариантная) интенсивность углов поворота грунта
в основании сооружения (ротации поля сейсмических движений). Инвариант
интенсивности углов вращения определяется относительной (по отношению к
инварианту ускорения поступательного движения) величиной V.
Расчетное значение
относительного инварианта интенсивности углов вращения
сейсмических движений грунта является функцией от меньшего размера
сооружения в плане B и вычисляется по формуле
где ![]() ;
; ![]() и
и ![]() для грунтов I, II и III категорий.
для грунтов I, II и III категорий.
Значение
нормированной аппроксимирующей функции ![]() определяется по графикам рис. 4 или
вычисляется по формуле
определяется по графикам рис. 4 или
вычисляется по формуле
где B (м) >= 25
м - меньший размер сооружения в плане;
d -
аппроксимирующий коэффициент, значение которого равно ![]() ;
; ![]() и
и ![]() для I, II и III категорий грунтов.
для I, II и III категорий грунтов.
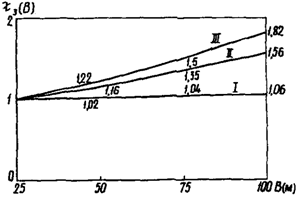
Рис. 4.
Графики нормированных функций ![]()
при ![]() ;
; ![]() и
и ![]()
для I, II и III
категорий грунтов соответственно
2.20.
Спектральный состав компонент векторов сейсмического воздействия (ускорения
поступательного движения ![]() ,
углового ускорения
,
углового ускорения ![]() и углов вращения
и углов вращения ![]() )
определяется соответствующими коэффициентами динамичности, в зависимости от
категории грунтов -
)
определяется соответствующими коэффициентами динамичности, в зависимости от
категории грунтов - ![]() ,
значений коэффициентов потерь энергии -
,
значений коэффициентов потерь энергии - ![]() (
(![]() - логарифмический
декремент колебаний), периодов собственных колебаний системы -
- логарифмический
декремент колебаний), периодов собственных колебаний системы - ![]() (
(![]() -
частоты собственных колебаний, см. п. 2.3 - п. 2.16 настоящих Рекомендаций).
-
частоты собственных колебаний, см. п. 2.3 - п. 2.16 настоящих Рекомендаций).
Для вектора
ускорения поступательного движения грунта значение коэффициента динамичности
определяется по СНиП II-7-81 и вычисляется по формуле
Здесь ![]() - коэффициент, учитывающий категорию грунтов
по СНиП II-7-81, значения которого принимаются по табл. 8.
- коэффициент, учитывающий категорию грунтов
по СНиП II-7-81, значения которого принимаются по табл. 8.
┌──────────────────┬──────────────┬───────────────┬──────────────┐
│Категория
грунтов │ I │ II
│ III │
├──────────────────┼──────────────┼───────────────┼──────────────┤
│ k │ 1
│ 0,9 │ 0,7
│
│ гр │ │ │ │
└──────────────────┴──────────────┴───────────────┴──────────────┘
Потери энергии при
колебаниях системы учитываются коэффициентом ![]() ,
значения которого определены для (33) в соответствии со СНиП II-7-81 и приведены
в табл. 9.
,
значения которого определены для (33) в соответствии со СНиП II-7-81 и приведены
в табл. 9.
┌─────────┬───────┬──────────────────────────────────────────────┐
│ гамма
│ 0,1 │ гамма < 0,1 │
│ │ │ сооружения со слабой диссипацией │
│ │ │ с учетом K = 1,5 по СНиП II-7-81 │
│ │ │ пси │
├─────────┼───────┼──────────────────────────────────────────────┤
│
a │ 3
│ 3 x 1,5 =
4,5 │
│ гамма
│ │
│
└─────────┴───────┴──────────────────────────────────────────────┘
Значения
нормированных по соответствующим максимумам коэффициентов динамичности ![]() определяются в зависимости от категории
грунтов по СНиП II-7-81 по графикам рис. 5 или вычисляются по формулам:
определяются в зависимости от категории
грунтов по СНиП II-7-81 по графикам рис. 5 или вычисляются по формулам:
для I категории
грунтов
для II категории
грунтов
для III категории
грунтов
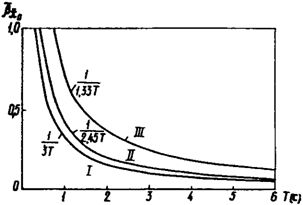
Рис. 5.
Графики нормированных коэффициентов динамичности
вектора ускорения
поступательного движения сейсмического
воздействия ![]() для грунтов I, II и III категорий
для грунтов I, II и III категорий
Для вектора
углового ускорения вращения сейсмического воздействия
значения коэффициента динамичности вычисляются по формуле
где ![]() - коэффициент, учитывающий категорию грунтов
по СНиП II-7-81, значения которого принимаются по данным табл. 8.
- коэффициент, учитывающий категорию грунтов
по СНиП II-7-81, значения которого принимаются по данным табл. 8.
Значения
коэффициента ![]() ,
учитывающего потери энергии при колебаниях системы, определяются по данным
табл. 10.
,
учитывающего потери энергии при колебаниях системы, определяются по данным
табл. 10.
┌────────┬─────────┬───────────┬───────────┬──────────┬──────────┐
│\
гамма │ 0,1 │
0,05 │ 0,02
│ 0,01 │
0,005 │
│ \
│ │ │ │ │ │
│ \
│ │ │ │ │ │
│ \ │ │ │ │ │ │
├────────┼─────────┼───────────┼───────────┼──────────┼──────────┤
│
b │ 3
│ 6 │
12 │ 20
│ 30 │
│ гамма │ │ │ │ │ │
├────────┼─────────┼───────────┼───────────┼──────────┼──────────┤
│
C │ 2,7
│ 5,4 │
10,8 │ 14
│ 20 │
│ гамма │ │ │ │ │ │
└────────┴─────────┴───────────┴───────────┴──────────┴──────────┘
Примечание. Для
других значений ![]() допускается коэффициенты
допускается коэффициенты
![]() и
и ![]() определять по интерполяции.
определять по интерполяции.
Нормированные
значения коэффициентов динамичности определяются по графику рис. 6 или вычисляются
по формуле
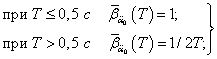
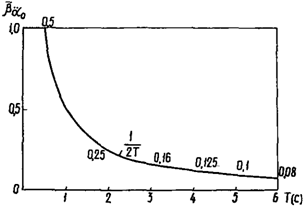
Рис. 6.
График нормированного коэффициента
динамичности
вектора углового ускорения вращения
сейсмического
воздействия ![]()
Для вектора углов вращения сейсмического воздействия значения коэффициента
динамичности вычисляются по формуле
где ![]() - коэффициент, учитывающий категорию грунтов
по СНиП II-7-81, значения которого определяются по данным табл. 8.
- коэффициент, учитывающий категорию грунтов
по СНиП II-7-81, значения которого определяются по данным табл. 8.
Значения
коэффициента ![]() ,
учитывающего потери энергии при колебаниях системы, определяются по данным
табл. 10.
,
учитывающего потери энергии при колебаниях системы, определяются по данным
табл. 10.
Нормированные
значения коэффициентов динамичности ![]() определяются по графику рис. 7 или вычисляются
по формуле
определяются по графику рис. 7 или вычисляются
по формуле
при 0 <= Т <= 0,5
с ![]() ;
;
при Т > 2
с ![]() .
.
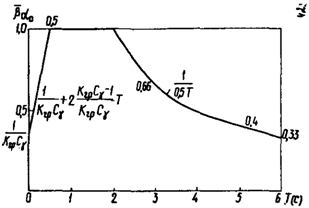
Рис. 7.
График нормированного коэффициента динамичности
вектора углов
вращения сейсмического воздействия ![]()
2.21.
Сейсмическое воздействие имеет произвольную ориентацию в пространстве (см. п.
2.3 СНиП II-7-81). Ориентация в пространстве векторов сейсмического воздействия
определяется их направляющими косинусами.
Вектор ускорения
поступательного движения грунта в основании сооружения задается в инерциальных
осях ![]() , в
качестве которых, в соответствии с п. 2.5 настоящих Рекомендаций, может быть
принята ориентация по сторонам света или какая-либо другая местная система трех
ортогональных направлений. Ориентация в пространстве вектора ускорения
поступательного движения
, в
качестве которых, в соответствии с п. 2.5 настоящих Рекомендаций, может быть
принята ориентация по сторонам света или какая-либо другая местная система трех
ортогональных направлений. Ориентация в пространстве вектора ускорения
поступательного движения ![]() определяется направляющими косинусами
определяется направляющими косинусами ![]() (i = 1, 2, 3), отсчитываемыми относительно
этих же инерциальных осей
(i = 1, 2, 3), отсчитываемыми относительно
этих же инерциальных осей ![]() .
Значения направляющих косинусов
.
Значения направляющих косинусов ![]() должны удовлетворять условиям нормировки,
имеющим вид
должны удовлетворять условиям нормировки,
имеющим вид
Векторы углового
ускорения ![]() и углов вращения
и углов вращения ![]() определяются в осях
определяются в осях ![]() ,
неизменно связанных с основанием сооружения. В качестве
,
неизменно связанных с основанием сооружения. В качестве ![]() ,
согласно п. 2.5 настоящих Рекомендаций, следует принимать систему главных осей
сооружения. Ориентация в пространстве векторов
,
согласно п. 2.5 настоящих Рекомендаций, следует принимать систему главных осей
сооружения. Ориентация в пространстве векторов ![]() и
и ![]() определяется направляющими косинусами
определяется направляющими косинусами ![]() и
и ![]() (i = 1, 2, 3), отсчитываемыми относительно
этих же осей
(i = 1, 2, 3), отсчитываемыми относительно
этих же осей ![]() .
Значения направляющих косинусов
.
Значения направляющих косинусов ![]() и
и ![]() должны удовлетворять условиям нормировки в
виде
должны удовлетворять условиям нормировки в
виде
Расчетные параметры
ориентации векторов сейсмического воздействия ![]() ,
, ![]() и
и ![]() определяются направляющими косинусами
определяются направляющими косинусами ![]() ,
, ![]() и
и ![]() (i = 1, 2, 3) в указанных осях. В расчетах
следует исходить из двух групп значений направляющих косинусов:
(i = 1, 2, 3) в указанных осях. В расчетах
следует исходить из двух групп значений направляющих косинусов:
- проверочные,
наиболее вероятные для заданного региона строительства значения направляющих
косинусов;
- основные
расчетные значения направляющих косинусов.
Расчет на наиболее
вероятные значения направляющих косинусов является проверочным и выполняется в
тех случаях, когда они известны для заданного региона строительства. Эти
значения ![]() ,
, ![]() и
и ![]() определяются по данным конкретной
сейсмологической обстановки: геология местности; возможные очаги землетрясений
и направления на них; опыт повреждений и разрушений во время прошедших
землетрясений; данные зарегистрированных процессов движения грунта и т.д. При
этом принимаемые проверочные значения направляющих косинусов должны
удовлетворять условиям нормировки (41), (42), (43).
определяются по данным конкретной
сейсмологической обстановки: геология местности; возможные очаги землетрясений
и направления на них; опыт повреждений и разрушений во время прошедших
землетрясений; данные зарегистрированных процессов движения грунта и т.д. При
этом принимаемые проверочные значения направляющих косинусов должны
удовлетворять условиям нормировки (41), (42), (43).
Расчет на основные
значения направляющих косинусов ![]() ,
, ![]() и
и ![]() является обязательным во всех случаях.
является обязательным во всех случаях.
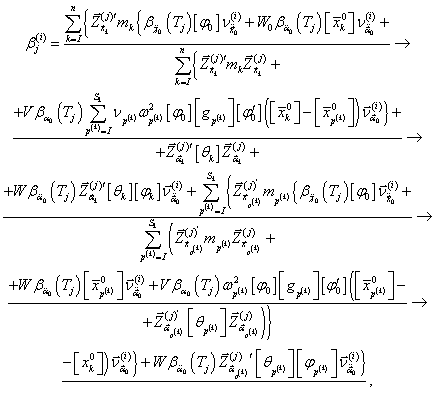
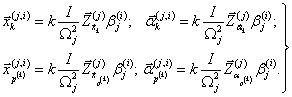
Основные расчетные
значения направляющих косинусов вычисляются отдельно для каждой из учитываемых
форм колебаний, исходя из условия максимума динамической реакции по рассматриваемой
форме колебаний. Эти значения направляющих косинусов для j-ой формы колебаний
определяются по следующим формулам:
 ; (44)
; (44) ; (45)
; (45)
 , (46)
, (46)
где
 (48)
(48)
Здесь ![]() - отношения масс
- отношения масс ![]() -го
подвешенного тела и k-го несущего тел, а
-го
подвешенного тела и k-го несущего тел, а ![]() и
и ![]() - кососимметричные матрицы, т.е.
- кососимметричные матрицы, т.е.
![]() ; (50)
; (50)
 , (51)
, (51)где ![]() и
и ![]() - масса
- масса ![]() -го
и k-го тел;
-го
и k-го тел;
![]() и
и ![]() (n = 1, 2, 3) - компоненты векторов
(n = 1, 2, 3) - компоненты векторов ![]() и
и ![]() ,
определяющих начала отсчетов систем осей
,
определяющих начала отсчетов систем осей ![]() или
или ![]() (см. п. 2.5 настоящих Рекомендаций).
(см. п. 2.5 настоящих Рекомендаций).
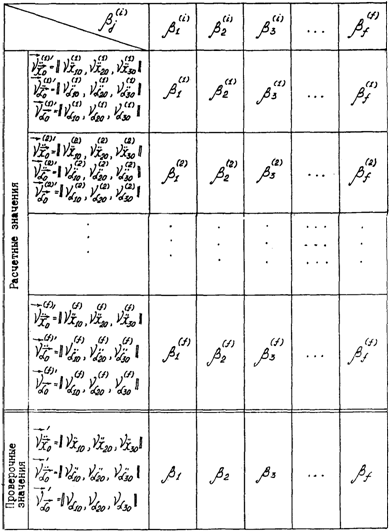
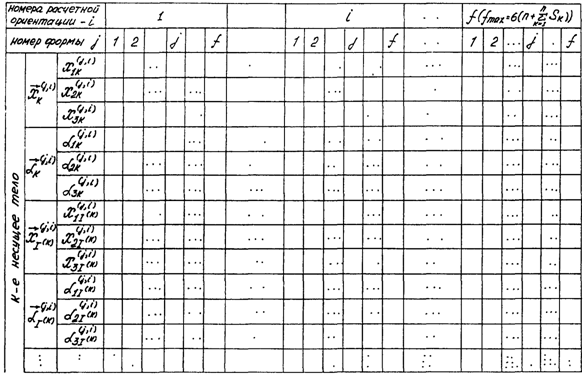
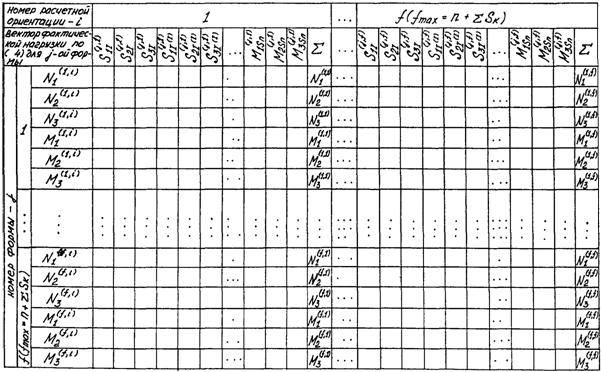
Результаты
вычислений расчетных значений направляющих косинусов по (44) - (51) сводятся в
табл. 11.
Расчет
режима вынужденных колебаний
2.22. Для
каждой из учитываемых форм колебаний по всем расчетным значениям направляющих
косинусов вычисляются коэффициенты динамичности по следующим формулам:
где ![]() - коэффициент динамичности j-ой формы
колебаний при i-ых расчетных направляющих косинусах по (44) - (51) (
- коэффициент динамичности j-ой формы
колебаний при i-ых расчетных направляющих косинусах по (44) - (51) (![]() -
число учитываемых форм колебаний, максимум f равен
-
число учитываемых форм колебаний, максимум f равен ![]() );
);
![]() ,
, ![]() и
и
![]() ,
, ![]() -
-
векторы коэффициентов перемещений центров
масс и углов вращения k-го и ![]() -го
тел по j-ой форме колебаний (эти векторы являются составляющими блочного
вектора
-го
тел по j-ой форме колебаний (эти векторы являются составляющими блочного
вектора ![]() (24), определяемого согласно п. 2.14 настоящих
Рекомендаций при расчете режима свободных колебаний);
(24), определяемого согласно п. 2.14 настоящих
Рекомендаций при расчете режима свободных колебаний);
![]() ,
, ![]() и
и ![]() -
-
векторы расчетных значений направляющих
косинусов, компоненты которых определяются из условия максимума реакции для
i-ой формы колебаний по (44) - (52).
Максимум значения
коэффициента динамичности (52) равен при i = j.
Результаты
вычислений коэффициентов динамичности сводятся в табл. 12.
2.23. Если расчет упругой системы выполняется по методу сил и, в
соответствии с требованиями п. 2.7 настоящих Рекомендаций, выполнялось
построение матрицы податливости ![]() (см. табл. 2), а также вычислялись внутренние
усилия в поперечных сечениях элементов несущих конструкций от единичной
нагрузки (см. табл. 1), то основными расчетными параметрами являются векторы
сейсмических сил и моментов.
(см. табл. 2), а также вычислялись внутренние
усилия в поперечных сечениях элементов несущих конструкций от единичной
нагрузки (см. табл. 1), то основными расчетными параметрами являются векторы
сейсмических сил и моментов.
Векторы
сейсмических сил и моментов по отдельным формам колебаний вычисляются по
следующим формулам:
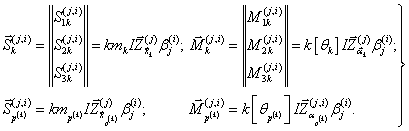
Коэффициент k в
(53) учитывает допускаемый уровень развития пластических деформаций,
допускаемые локальные повреждения и их накопление в сооружении.
Если рассчитываемые
сооружения относятся к категории особо ответственных и в них не допускается
развитие пластических деформаций и каких-либо локальных повреждений, то k
должен приниматься равным единице.
При расчетах
сооружений крупных теплоэлектростанций с мощными подвешенными теплоагрегатами
значение коэффициента k следует принимать, руководствуясь требованиями [14].
При расчетах
атомных электростанций с провисающим оборудованием значение коэффициента k
необходимо принимать, руководствуясь требованиями РТМ 108.020.37.81 [15].
Для сооружений
промышленного назначения со встроенным подвешенным технологическим
оборудованием значения коэффициента k следует принимать по специальному
обоснованию, в соответствии с принятой конструктивной схемой сооружения и ее
способностями к развитию в ней пластических деформаций и местных повреждений,
не приводящих к выходу из строя сооружения в целом. Значение k должно
приниматься в диапазоне 0,25 <= k <= 1. Значение коэффициента k должно
задаваться в задании на проектирование, корректироваться в ходе выполнения
проектных работ, в связи с принятым конкретным конструктивным решением, и
окончательно утверждаться министерством-заказчиком.
Для сооружений
гражданского назначения с подвешенными этажами следует учитывать, что значение
коэффициента k отражает индивидуальные свойства по образованию пластических
деформаций и местных повреждений в принятой конструктивной схеме. Эти свойства
сооружений с подвешенными этажами отличаются от аналогичных свойств зданий обычной конструктивной схемы. Поэтому при
определении значений k для зданий с подвешенными массами аналогичные значения ![]() по табл. 3 СНиП II-7-81 могут выполнять только
роль ориентира. С учетом индивидуальности проектов зданий с подвешенными
этажами, значения коэффициента k в этом случае следует согласовать с Госстроями
Союзных республик, ЦНИИСК им. В.А. Кучеренко и Госстроем СССР.
по табл. 3 СНиП II-7-81 могут выполнять только
роль ориентира. С учетом индивидуальности проектов зданий с подвешенными
этажами, значения коэффициента k в этом случае следует согласовать с Госстроями
Союзных республик, ЦНИИСК им. В.А. Кучеренко и Госстроем СССР.
В (53) ![]() и
и ![]() - векторы сейсмических сил и моментов,
действующих на тело с номером... по j-ой форме колебаний при i-ой расчетной
ориентации векторов сейсмического воздействия. Значения этих векторов
сейсмических сил и моментов вычисляются для каждой из рассчитываемых форм
колебаний и по каждому варианту ориентации векторов воздействия. Максимальные
значения векторов сейсмических сил и моментов (53) для каждой формы колебаний
определяются при значениях направляющих косинусов по (44) - (51) для этой же
формы. Результаты расчета сводятся в табл. 13.
- векторы сейсмических сил и моментов,
действующих на тело с номером... по j-ой форме колебаний при i-ой расчетной
ориентации векторов сейсмического воздействия. Значения этих векторов
сейсмических сил и моментов вычисляются для каждой из рассчитываемых форм
колебаний и по каждому варианту ориентации векторов воздействия. Максимальные
значения векторов сейсмических сил и моментов (53) для каждой формы колебаний
определяются при значениях направляющих косинусов по (44) - (51) для этой же
формы. Результаты расчета сводятся в табл. 13.
Продолжение табл.
13
2.24. Если расчет упругой системы выполнялся по методу деформаций и, в
соответствии с требованиями п. 2.8 настоящих Рекомендаций, выполнялось
построение матрицы жесткости ![]() (см. табл. 4), а также вычислялись внутренние
усилия в поперечных сечениях упругих элементов несущих конструкций от единичных
перемещений и углов поворота, то основными расчетными параметрами являются
векторы сейсмических перемещений центров масс и углов вращения тел.
(см. табл. 4), а также вычислялись внутренние
усилия в поперечных сечениях упругих элементов несущих конструкций от единичных
перемещений и углов поворота, то основными расчетными параметрами являются
векторы сейсмических перемещений центров масс и углов вращения тел.
Для отдельных форм
колебаний векторы сейсмических перемещений и углов вращения тел определяются по
следующим формулам:
Здесь ![]() и
и ![]() - векторы сейсмических перемещений центров
масс и углов вращения тела с номером... по j-ой форме колебаний при i-ой
расчетной ориентации векторов сейсмического воздействия. Значения этих векторов
вычисляются для каждой из рассчитываемых форм колебаний и по каждому варианту
ориентации векторов воздействия. Максимальные значения векторов (54) для каждой
формы колебаний определяются при значениях направляющих косинусов по (44) -
(51) для этой же формы. Результаты расчета сводятся в табл. 14.
- векторы сейсмических перемещений центров
масс и углов вращения тела с номером... по j-ой форме колебаний при i-ой
расчетной ориентации векторов сейсмического воздействия. Значения этих векторов
вычисляются для каждой из рассчитываемых форм колебаний и по каждому варианту
ориентации векторов воздействия. Максимальные значения векторов (54) для каждой
формы колебаний определяются при значениях направляющих косинусов по (44) -
(51) для этой же формы. Результаты расчета сводятся в табл. 14.
Продолжение табл.
14
Определение
расчетных значений внутренних усилий
в несущих
конструкциях сооружений
2.25. Если расчет упругой системы выполнялся в соответствии с
требованиями п. 2.7 настоящих Рекомендаций по методу сил и вычислялись
внутренние усилия в поперечных сечениях элементов несущих конструкций от
единичной нагрузки (см. табл. 1), то следует выполнить корректировку этих
единичных внутренних усилий на фактические величины сейсмических сил и
моментов, определенных согласно п. 2.23 данных Рекомендаций (см. табл. 13).
В (53) ![]() или
или ![]() - компоненты (составляющие) векторов
- компоненты (составляющие) векторов ![]() или
или ![]() ,
представляющие сейсмические силы, действующие на k-ое несущее тело или
,
представляющие сейсмические силы, действующие на k-ое несущее тело или ![]() -ое
подвешенное тело (k = I, II, ... n;
-ое
подвешенное тело (k = I, II, ... n; ![]() ),
приложенные к центрам масс этих тел (к точкам k или
),
приложенные к центрам масс этих тел (к точкам k или ![]() ) в
направлении оси l (l = 1, 2, 3) системы отсчета
) в
направлении оси l (l = 1, 2, 3) системы отсчета ![]() по j-ой форме колебаний при i-ой расчетной
ориентации векторов сейсмического воздействия. Аналогично в (53),
по j-ой форме колебаний при i-ой расчетной
ориентации векторов сейсмического воздействия. Аналогично в (53), ![]() или
или ![]() - компоненты (составляющие) векторов
- компоненты (составляющие) векторов ![]() или
или ![]() ,
представляющие сейсмические моменты, действующие на k-ое несущее или
,
представляющие сейсмические моменты, действующие на k-ое несущее или ![]() -ое
подвешенное тела, приложенные относительно l-ой (l = 1, 2, 3) оси системы
отсчета
-ое
подвешенное тела, приложенные относительно l-ой (l = 1, 2, 3) оси системы
отсчета ![]() или
или ![]() , по
той же j-ой форме колебаний и при той же i-ой ориентации векторов сейсмического
воздействия. В табл. 1 даны внутренние усилия от аналогичных по характеру
единичных сил и моментов.
, по
той же j-ой форме колебаний и при той же i-ой ориентации векторов сейсмического
воздействия. В табл. 1 даны внутренние усилия от аналогичных по характеру
единичных сил и моментов.
Корректировкой этих
значений единичных сил на фактические величины усилий от сейсмических сил и
моментов определяются фактические внутренние усилия в рассматриваемом
поперечном сечении проверяемого элемента конструкций. Корректировка выполняется
по следующим формулам:
где ![]() ,
, ![]() и
и ![]() - поперечные и продольные силы, а
- поперечные и продольные силы, а ![]() ,
, ![]() и
и ![]() - изгибающие и крутящие моменты для
рассматриваемого поперечного сечения по j-ой форме колебаний при i-ой расчетной
ориентации векторов сейсмического воздействия;
- изгибающие и крутящие моменты для
рассматриваемого поперечного сечения по j-ой форме колебаний при i-ой расчетной
ориентации векторов сейсмического воздействия;
![]() и
и ![]() - соответствующие единичные внутренние усилия
по табл. 1;
- соответствующие единичные внутренние усилия
по табл. 1;
![]() ,
, ![]() и
и ![]() ,
, ![]() (13) - компоненты фактических векторов
сейсмических сил и моментов по данным табл. 13.
(13) - компоненты фактических векторов
сейсмических сил и моментов по данным табл. 13.
Внутренние усилия
(55) вычисляются для каждой рассчитываемой формы колебаний и для каждого
расчетного варианта ориентации векторов сейсмического воздействия. Для каждой
формы колебаний максимум усилий (55) имеет место при значениях направляющих
косинусов (44) - (51). Результаты этого расчета сводятся в табл. 15.
2.26. Если расчет упругой системы выполнялся в соответствии с
требованиями п. 2.8 по методу перемещений и вычислялись внутренние усилия в
поперечных сечениях элементов несущих конструкций от единичных перемещений и
углов поворота (см. табл. 3), то следует выполнить корректировку этих единичных
внутренних усилий на фактические величины перемещений и углов вращения,
определенные по (54) согласно п. 2.24 данных Рекомендаций (см. табл. 14).
В (54) ![]() или
или ![]() - компоненты (составляющие) векторов
- компоненты (составляющие) векторов ![]() или
или ![]() ,
представляющие перемещения центров масс k-го (k = I, II, ..., n) несущего и
,
представляющие перемещения центров масс k-го (k = I, II, ..., n) несущего и ![]() -го
-го
![]() подвешенного тел (точек k и
подвешенного тел (точек k и ![]() ) в
направлении оси l (l = 1, 2, 3) системы отсчета
) в
направлении оси l (l = 1, 2, 3) системы отсчета ![]() по j-ой форме колебаний при i-ой расчетной
ориентации векторов сейсмического воздействия. Аналогично в (54),
по j-ой форме колебаний при i-ой расчетной
ориентации векторов сейсмического воздействия. Аналогично в (54), ![]() или
или ![]() - углы поворота k-го и
- углы поворота k-го и ![]() -го
тел относительно осей l (l = 1, 2, 3) систем отсчета
-го
тел относительно осей l (l = 1, 2, 3) систем отсчета ![]() или
или ![]() по той же j-ой форме при той же i-ой расчетной
ориентации векторов воздействия. В табл. 3 даны внутренние усилия от
аналогичных по характеру единичных перемещений и углов поворота.
по той же j-ой форме при той же i-ой расчетной
ориентации векторов воздействия. В табл. 3 даны внутренние усилия от
аналогичных по характеру единичных перемещений и углов поворота.
Корректировкой этих
значений единичных внутренних усилий на фактические величины перемещений и
углов вращения определяются фактические внутренние усилия в рассматриваемом
поперечном сечении проверяемого элемента конструкций. Корректировка выполняется
по следующим формулам:
где ![]() ,
, ![]() и
и ![]() - поперечные и продольные силы, а
- поперечные и продольные силы, а ![]() ,
, ![]() и
и ![]() - изгибающие и крутящие моменты для рассматриваемого
поперечного сечения по j-ой форме колебаний при i-ой расчетной ориентации
векторов сейсмического воздействия;
- изгибающие и крутящие моменты для рассматриваемого
поперечного сечения по j-ой форме колебаний при i-ой расчетной ориентации
векторов сейсмического воздействия;
![]() и
и ![]() - соответствующие единичные внутренние усилия
по табл. 3;
- соответствующие единичные внутренние усилия
по табл. 3;
![]() ,
, ![]() и
и ![]() ,
, ![]() (54) - фактические перемещения и углы вращения
по данным табл. 14.
(54) - фактические перемещения и углы вращения
по данным табл. 14.
Внутренние усилия
(56) вычисляются для каждой формы колебаний и каждого расчетного варианта
ориентации векторов сейсмического воздействия. Максимум усилий (56) для каждой
формы колебаний имеет место при значениях направляющих косинусов по (44) -
(51). Результаты расчета сводятся в табл. 16.
2.27. Для
каждого i-го расчетного варианта ориентации векторов сейсмического воздействия
по внутренним усилиям, соответствующим отдельным j-ым формам колебаний ![]() и
и ![]() ,
определяются расчетные значения
,
определяются расчетные значения ![]() и
и ![]() внутренних усилий в рассматриваемом поперечном
сечении элемента конструкций:
внутренних усилий в рассматриваемом поперечном
сечении элемента конструкций:
 , (57)
, (57)где m - число
учитываемых форм колебаний при определении расчетных значений внутренних усилий
в h-ом поперечном сечении для i-го варианта ориентации векторов сейсмического
воздействия. Результаты расчета сводятся в табл. 17.
2.28. Из
расчетных усилий (57), соответствующих всем рассматриваемым вариантам
ориентации векторов сейсмического воздействия, по данным табл. 17 принимаются
максимальные значения для проверки несущей способности рассматриваемого сечения
в сочетании с усилиями от других видов нагрузок. Направляющие косинусы ![]() ,
, ![]() ,
, ![]() (i = 1, 2, 3), соответствующие принятым
максимальным значениям внутренних усилий, определяют наиболее опасную
ориентацию векторов сейсмического воздействия для рассматриваемого сечения
элементов несущих конструкций сооружения.
(i = 1, 2, 3), соответствующие принятым
максимальным значениям внутренних усилий, определяют наиболее опасную
ориентацию векторов сейсмического воздействия для рассматриваемого сечения
элементов несущих конструкций сооружения.
Приложение
1
ПРИМЕР
РАСЧЕТА ПО ОПРЕДЕЛЕНИЮ СЕЙСМИЧЕСКОЙ НАГРУЗКИ
С УЧЕТОМ
ПРОСТРАНСТВЕННОГО ХАРАКТЕРА ВОЗДЕЙСТВИЯ И РАБОТЫ
КОНСТРУКЦИЙ
СООРУЖЕНИЙ С ПОДВЕШЕННЫМИ МАССАМИ
(расчет
типового каркасного сооружения ТЭС
с подвешенным
серийным котлом марки КВ-ГМ-100-150С)
Наиболее простым
является типовое решение ТЭС в виде металлического каркасного сооружения с подвешенным
котлом марки КВ-ГМ-100-150С. Описание конструктивного решения этого типового
сооружения ТЭС дано в РТМ 108.031.114-85 [14], где приведен его расчет по
одномерным схемам. Все характеристики поперечных сечений (площади, моменты
инерции) металлических конструкций каркаса, несущих подвесок, элементов
подвешенного котла, а также конструктивные решения узловых соединений даны в
[14]. В соответствии с этими данными схема каркаса, подвешенного котла и план
расположения подвесок с кодировкой узлов такой упругой схемы для расчета на ЭВМ
даны на рис. 8, а, б, в.
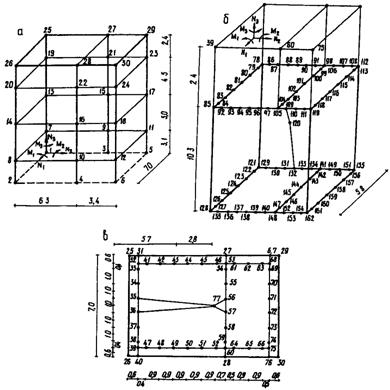
Рис. 8.
Упругие схемы каркаса (а),
подвешенного котла
марки КВ-ГМ-100-150С (б)
и план расположения
несущих подвесок (в)
с кодировкой узлов
для расчета на ЭВМ
Расчет выполняется
в соответствии с алгоритмом, изложенным в разделе 2 п. 2.
Описание
расчетной динамической модели
и определение ее
параметров
1. Согласно п. 2.2,
в качестве расчетной динамической модели принимается дискретная
пространственная система, состоящая из двух масс, моделирующих соответственно
массу несущих и подвешенных конструкций.
Конструкции
перекрытия (несущие хребтовые балки, см. узлы 25 - 30 на рис. 8, а, б, в,
несущие подвешенный котел) имеют мощные поперечные сечения, и их деформации в
горизонтальной плоскости на порядок меньше соответствующих деформаций,
определяемых изгибной жесткостью каркаса. Поэтому
диск конструкций перекрытия совместно с покрытием можно условно считать
абсолютно твердым телом. Другим абсолютно твердым телом принимается подвешенный
котел.
Каркас сооружения и
несущие подвески котла считаются невесомыми упругими связями (стержнями) между
этими телами.
Верхняя половина
массы каркаса относится к условно принятому за
абсолютно твердое перекрытие. Половина массы несущих подвесок также относится к
твердому телу, моделирующему перекрытие. Другая половина массы подвесок
относится к твердому телу, моделирующему подвешенный котел.
Фундамент
сооружения с примыкающим к нему массивом грунта принимается твердым телом без
определенных размеров.
2. По п. 2.3
недеформируемые элементы (покрытие и подвешенный котел) принимаются в расчетной
динамической модели в виде абсолютно твердых тел с размерами соответственно: 7
x 9,7 x 3 м и 5,8 x 8,5 x 10,3 м (см. рис. 8, б). Массы этих тел по данным [14]
и в соответствии с требованиями п. 2.2 настоящих Рекомендаций равны: масса
покрытия - 2100 кг; масса подвешенного котла - 20500 кг. С учетом равномерного
распределения масс, положение главных центральных осей инерции этих тел
определяется в их геометрическом центре. Осевые моменты инерции масс этих тел
относительно главных центральных осей вычисляются как для прямоугольных
параллелепипедов по известным формулам. Эти осевые моменты инерции равны: для
параллелепипеда, моделирующего покрытие - ![]() ,
, ![]() ,
, ![]() ; для
параллелепипеда, моделирующего подвешенный котел -
; для
параллелепипеда, моделирующего подвешенный котел - ![]() ,
, ![]() ,
, ![]() .
.
3. По п. 2.4
металлические несущие конструкции каркаса (колонны, ригели) и подвески
принимаются упругими стержнями с линейной диаграммой деформирования при модуле
упругости для всех конструкций ![]() .
.
Поскольку в
расчетной динамической модели обе массы приняты в виде твердых тел с заданными
геометрическими характеристиками, то работа всех конструкций каркаса (колонн,
ригелей) и всех подвесок учитывается раздельно, т.е. в расчет вводится реальная
схема каркаса сооружения без каких-либо условных объединений.
Расчет упругих
свойств рассматриваемой системы выполняется на ЭВМ по методу конечного элемента
на основе известной программы "Лира". Все элементы каркаса и подвески
представляются упругими стержнями с точечным поперечным сечением, т.е.
рассматривается упругая стержневая схема с кодировкой узлов, показанной на рис.
8, б.
4. В соответствии с
п. 2.5 расчетная динамическая модель принимает вид, приведенный на рис. 9, где
упругая система показана условно (ее детальная проработка дана на рис. 8, а).
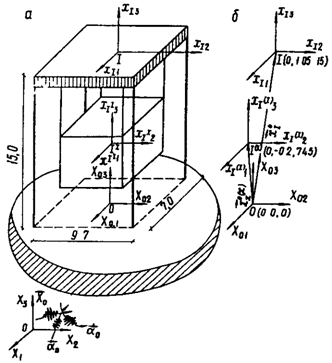
Рис. 9.
Расчетная динамическая модель сооружения ТЭС
с подвешенным
котлом марки КЦ-ГМ-100-150С (а)
и схема осей
отсчета, связанных с несущей I
и подвешенной ![]() массами
массами
Поскольку пример
расчета выполняется без привязки к конкретному региону, то инерциальные оси
отсчета ![]() принимаются без привязки начала отсчета параллельными главным осям сооружения.
принимаются без привязки начала отсчета параллельными главным осям сооружения.
Вводим
систему отсчета ![]() ,
связанную с подвижным основанием (телом, моделирующим массив фундамента с
прилегающим грунтом), в качестве которой согласно настоящим Рекомендациям
принимаем главные оси сооружения.
,
связанную с подвижным основанием (телом, моделирующим массив фундамента с
прилегающим грунтом), в качестве которой согласно настоящим Рекомендациям
принимаем главные оси сооружения.
Поскольку оси ![]() и
и ![]() параллельны, то матрица
параллельны, то матрица ![]() , где E
- единичная матрица.
, где E
- единичная матрица.
Устанавливаем
следующую нумерацию масс в расчетной динамической модели: несущему телу,
моделирующему покрытие, присваиваем номер 1; подвешенному телу, моделирующему
котел, присваиваем номер ![]() . Всего
в системе два тела с шестью степенями свободы каждое (двенадцать степеней
свободы).
. Всего
в системе два тела с шестью степенями свободы каждое (двенадцать степеней
свободы).
Определяем
положения главных и центральных осей инерции несущей и подвешенной массы. С учетом равномерного распределения масс эти оси являются осями
симметрии для несущего - ![]() и подвешенного -
и подвешенного - ![]() тел.
тел.
Поскольку оси ![]() и
и ![]() параллельны осям
параллельны осям ![]() (см. рис. 9), то матрицы
(см. рис. 9), то матрицы ![]() (2) и
(2) и ![]() (3) являются единичными, т.е.
(3) являются единичными, т.е. ![]() .
.
По геометрическим
данным векторы ![]() и
и ![]() равны (см. рис. 9):
равны (см. рис. 9): ![]() ;
; ![]() (м).
(м).
На рис. 9, б показано
взаимное положение введенных осей отсчета.
Описание
упругих свойств расчетной динамической модели
5. Согласно п. 2.6
упругая схема системы "сооружение - подвешенный котел" показана на
рис. 8, а, где дана кодировка всех узлов стержневой аппроксимации с целью
последующего применения известного комплекса "Лира" для выполнения
статического расчета от единичных загружений.
6. В соответствии с
п. 2.7 для выполнения расчета упругой системы по методу сил (с целью
формирования матрицы податливости системы ![]() и оценки напряженно-деформированного состояния
несущих конструкций) выполняется загружение схемы, показанной на рис. 8, а, б, в, единичной нагрузкой. Блочный вектор этой нагрузки (4)
имеет вид:
и оценки напряженно-деформированного состояния
несущих конструкций) выполняется загружение схемы, показанной на рис. 8, а, б, в, единичной нагрузкой. Блочный вектор этой нагрузки (4)
имеет вид:

Здесь силы ![]() приложены к точке 1 по направлению i-ой (i =
1, 2, 3) оси системы отсчета
приложены к точке 1 по направлению i-ой (i =
1, 2, 3) оси системы отсчета ![]() , а
моменты
, а
моменты ![]() - относительно i-ой оси системы отсчета
- относительно i-ой оси системы отсчета ![]() (см. рис. 9). Силы
(см. рис. 9). Силы ![]() приложены к точке
приложены к точке ![]() (см. рис. 9), которая соответствует узлу N 120
(см. рис. 8, б), по направлению i-ой оси системы отсчета
(см. рис. 9), которая соответствует узлу N 120
(см. рис. 8, б), по направлению i-ой оси системы отсчета ![]() , и
моменты
, и
моменты ![]() относительно системы отсчета
относительно системы отсчета ![]() .
.
От действия
каждой единичной силы или единичного момента (компонент вектора ![]() )
выполняется расчет на ЭВМ по программе "Лира" упругой системы,
показанной на рис. 8, а, б, в. В результате этого расчета определяются
внутренние усилия во всех элементах упругой системы, а также вычисляются
перемещения и углы поворота систем отсчета
)
выполняется расчет на ЭВМ по программе "Лира" упругой системы,
показанной на рис. 8, а, б, в. В результате этого расчета определяются
внутренние усилия во всех элементах упругой системы, а также вычисляются
перемещения и углы поворота систем отсчета ![]() и
и ![]() - компоненты вектора
- компоненты вектора ![]() (5).
(5).
Выборочно для
угловой колонны (конечный элемент 1 - 7, сечения узлов 1 и 7, см. рис. 8, а), в
табл. 18 сведены внутренние усилия, как это требуется при заполнении табл. 1.
Таблица 18
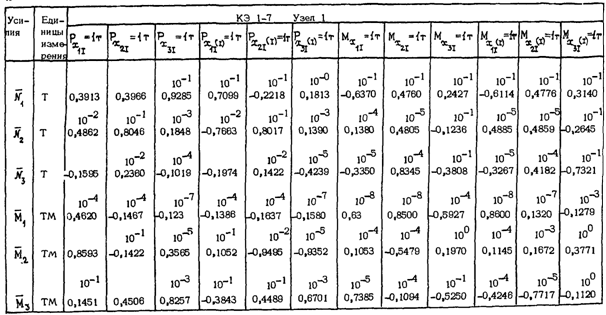
Продолжение табл.
18
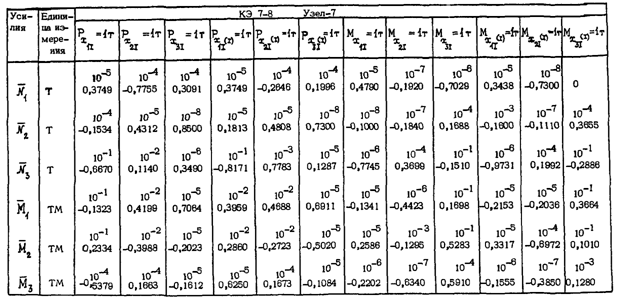
В табл. 19 сведена
матрица податливости упругой системы, как это требуется в соответствии с табл.
2.
Таблица 19
Матрица
податливости всей системы
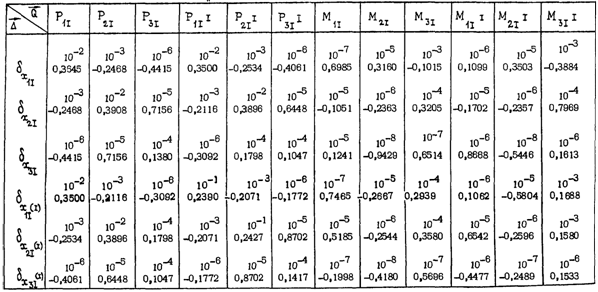
Продолжение табл.
19

7. Расчет упругой
системы методом деформации выполняется по п. 2.2. В данном примере этот пункт
можно не выполнять, т.к. выполняются требования п. 2.7.
Расчет
режима свободных колебаний
8. Согласно п. 2.9
из инерционных параметров твердых тел составляется матрица [M], главная
диагональ которой имеет вид (7). Для рассматриваемого примера эта матрица
сведена в табл. 20.
Таблица 20
Матрица
масс динамической системы
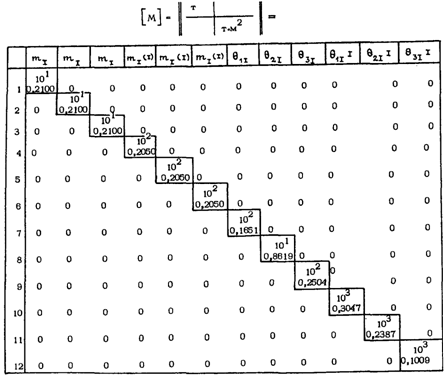
9. По п. 2.10
составляется матрица гравитационных добавок [H] к матрице жесткости ![]() .
Размерность [H] такая же, как размерность
.
Размерность [H] такая же, как размерность ![]() - 12 x 12 (см. табл. 19).
- 12 x 12 (см. табл. 19).
Парциальная частота
колебаний подвешенного котла определяется по (9) при условной длине подвески ![]() (расстояние по вертикали между нижней
поверхностью I-го тела и центром масс подвешенного тела
(расстояние по вертикали между нижней
поверхностью I-го тела и центром масс подвешенного тела ![]() , см.
рис. 9):
, см.
рис. 9):
![]() .
.
Подвешивание котла
выполнено на вертикально ориентированных подвесках. Пренебрегая малым
несовпадением центров масс I несущего и ![]() подвешенного тел в горизонтальной плоскости,
определим компоненты матрицы
подвешенного тел в горизонтальной плоскости,
определим компоненты матрицы ![]() (10) в виде (12), т.е.
(10) в виде (12), т.е.
Координаты условной
точки подвесок по данным рис. 9 в осях ![]() равны
равны ![]() , т.е.
кососимметричная матрица
, т.е.
кососимметричная матрица ![]() (15) имеет следующее значение:
(15) имеет следующее значение:
 .
.
Составляющие (13) и
(14) матрицы [H] равны:
 ;
;
 .
.
Из этих
составляющих по форме табл. 5 формируется матрица гравитационных добавок [H],
которая сведена в табл. 21.
Таблица 21
Матрица
гравитационных добавок
┌───┬───────┬──────┬──┬───────┬───────┬──┬───────┬───────┬───────┬──┬──┬──┐
│
N │ 1 │
2 │3 │ 4
│ 5 │6 │ 7
│ 8 │
9
│10│11│12│
│п/п│
│ │ │
│ │ │
│ │ │
│ │ │
├───┼───────┼──────┼──┼───────┼───────┼──┼───────┼───────┼───────┼──┼──┼──┤
│ │
2 │ │
│ 2 │
│ │ │ 2
│ 2 │
│ │ │
│ │
10 │ │
│ 10 │
│ │ │
10 │ 10
│ │ │
│
│
1 │0,3075 │ 0 │0 │-0,3075│ 0
│0 │ 0 │-0,3075│0,3844 │0
│0 │0 │
│ │
│ │ │
│ │ │
│ │ │
│ │ │
│ │
│ 2 │ │
│ 2 │
│ 2 │ │ │
│ │ │
│ │
│ 10 │
│ │ 10
│ │ 10 │ │ │
│ │ │
│
2 │ 0 │0,3075│0 │ 0
│-0,3075│0 │0,3075 │ 0
│ 0 │0 │0 │0 │
│ │
│ │ │
│ │ │
│ │ │
│ │ │
│
3 │ 0 │
0 │0 │ 0
│ 0 │0 │ 0
│ 0 │
0 │0 │0 │0
│
│ │
│ │ │
│ │ │
│ │ │
│ │ │
│ │
2 │ │
│ 2 │
│ │ │ 2
│ 2 │
│ │ │
│ │
10 │ │
│ 10 │
│ │ │
10 │ 10
│ │ │
│
│
4 │-0,3075│ 0 │0 │0,3075 │ 0
│0 │ 0 │0,3075 │-0,3844│0
│0 │0 │
│ │
│ │ │
│ │ │
│ │ │
│ │ │
│ │
│ 2 │ │
│ 2 │
│ │ │ │
│ │ │
│ │
│ 10 │
│ │ 10
│ │ │ │ │
│ │ │
│
5 │ 0 │-3075 │0 │ 0
│0,3075 │0 │-0,3075│ 0
│ 0 │0 │0 │0 │
│ │
│ │ │
│ │ │
│ │ │
│ │ │
│
6 │ 0 │
0 │0 │ 0
│ 0 │0 │ 0
│ 0 │
0 │0 │0 │0
│
│ │
│ │
│ │ │
│ │ │ │
│ │ │
│
7 │ 0 │
0 │0 │ 0
│ 0 │0 │ 0
│ 0 │
0 │0 │0 │0
│
│ │
│ │ │
│ │ │
│ │ │
│ │ │
│
8 │ 0 │
0 │0 │ 0
│ 0 │0 │ 0
│ 0 │
0 │0 │0 │0
│
│ │
│ │ │
│ │ │
│ │ │
│ │ │
│
9 │ 0 │
0 │0 │ 0
│ 0 │0 │ 0
│ 0 │
0 │0 │0 │0
│
│ │
│ │ │
│ │ │
│ │ │
│ │ │
│10
│ 0 │
0 │0 │ 0
│ 0 │0 │ 0
│ 0 │
0 │0 │0 │0
│
│ │
│ │ │
│ │ │
│ │ │
│ │ │
│11
│ 0 │
0 │0 │ 0
│ 0 │0 │ 0
│ 0 │
0 │0 │0 │0
│
│ │
│ │
│ │ │
│ │ │ │
│ │ │
│12
│ 0 │
0 │0 │ 0
│ 0 │0 │ 0
│ 0 │
0 │0 │0 │0
│
└───┴───────┴──────┴──┴───────┴───────┴──┴───────┴───────┴───────┴──┴──┴──┘
Таблица 22
Параметры
собственных форм колебаний
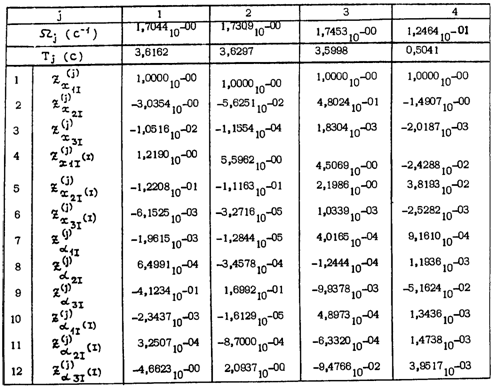
Продолжение табл.
22
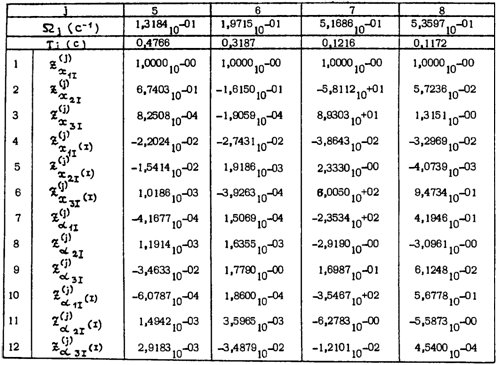
Продолжение табл.
22
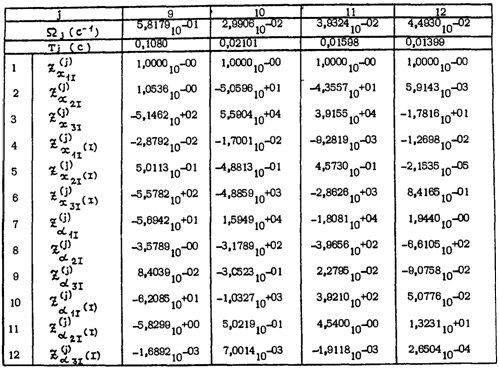
Таблица 23
Условия
ортогональности собственных форм
┌───┬────────────┬────────────┬────────────┬────────────┬────────────┬────────────┐
│
N │ 1 │ 2
│ 3 │ 4
│ 5 │ 6
│
│п/п│
│ │ │ │ │ │
├───┼────────────┼────────────┼────────────┼────────────┼────────────┼────────────┤
│
1 │+0,5305 +04│-0,8164 +03│-0,3939 +03│+0,1104 -00│+0,9588 -01│+0,3208 -02│
│ │
10 │ 10
│ 10 │
10 │ 10
│ 10 │
│ │ │ │ │ │ │ │
│
2 │-0,8164 +03│+0,1087 +04│+0,4940 +03│+0,1702 -01│-0,2282 -02│-0,8319 +00│
│ │
10 │ 10
│ 10 │
10 │ 10
│ 10 │
│ │ │ │ │ │ │ │
│
3 │-0,3939 +03│+0,4940 +03│+0,5190 +03│+0,4891 -01│+0,3048 -01│-0,6206 +00│
│ │
10 │ 10
│ 10 │
10 │ 10
│ 10 │
│ │ │ │ │ │ │ │
│
4 │+0,1104 -00│+0,1702 -01│+0,4891 -01│+0,6878 +01│+0,3490 -01│+0,3085 -00│
│ │
10 │ 10
│ 10 │
10 │ 10
│ 10 │
│ │ │ │ │ │ │ │
│
5 │+0,9588 -01│-0,2282 -02│+0,3048 -01│+0,3490 -01│+0,3100 +01│+0,3312 -00│
│ │
10 │ 10
│ 10 │
10 │ 10
│ 10 │
│ │ │ │ │ │ │ │
│
6 │+0,3208 -02│-0,8319 +00│-0,6206 +00│+0,3085 -00│+0,3312 -00│+0,8155 +02│
│ │
10 │
10 │ 10
│ 10 │
10 │ 10
│
│ │ │ │ │ │ │ │
│
7 │-0,2569 +02│+0,3956 -01│+0,4689 +01│+0,3143 +01│-0,3291 +01│-0,1453 +01│
│ │
10 │ 10
│ 10 │
10 │ 10
│ 10 │
│ │ │ │ │ │ │ │
│
8 │+0,6634 -01│-0,1576 -00│-0,1312 -00│+0,4167 -01│+0,3353 -01│+0,1058 -01│
│ │
10 │ 10
│ 10 │
10 │ 10
│ 10 │
│ │ │ │ │ │ │ │
│
9 │-0,3399 +01│-0,4363 -00│+0,5267 +00│+0,1825 +01│+0,6081 +00│+0,1508 +01│
│ │
10 │ 10
│ 10 │
10 │ 10
│ 10 │
│ │ │ │ │ │ │ │
│10
│+0,4713 +02│-0,3270 -00│-0,9248 +01│-0,7927 +01│+0,4205 +01│-0,3222 -00│
│ │
10 │ 10
│ 10 │
10 │ 10
│ 10 │
│ │ │ │ │ │ │ │
│11
│-0,3422 +02│-0,6073 +00│+0,6121 +01│+0,5737 +01│-0,2308 +01│+0,8345 +00│
│ │
10 │ 10
│ 10
│ 10 │
10 │ 10
│
│ │ │ │ │ │ │ │
│12
│+0,7457 -01│-0,4620 -00│-0,3691 -00│+0,1412 -00│+0,8789 -01│+0,1093 -00│
│ │
10 │ 10
│ 10
│ 10 │
10 │ 10
│
└───┴────────────┴────────────┴────────────┴────────────┴────────────┴────────────┘
Продолжение табл.
23
┌───┬────────────┬────────────┬────────────┬────────────┬────────────┬────────────┐
│
N │ 7 │
8 │ 9
│ 10 │
11 │ 12
│
│п/п│
│ │ │ │ │ │
├───┼────────────┼────────────┼────────────┼────────────┼────────────┼────────────┤
│
1 │-0,2569 +02│+0,6634 -01│-0,3399 +01│+0,4713 +02│-0,3422 +02│+0,7457 -01│
│ │
10 │ 10
│ 10 │
10 │ 10
│ 10 │
│ │ │ │ │ │ │ │
│
2 │+0,3956 -01│-0,1576 -00│-0,4363 -00│-0,3270 -00│-0,6073 +00│-0,4620 -00│
│ │
10 │ 10
│ 10 │
10 │ 10
│ 10 │
│ │ │ │ │ │ │ │
│
3 │+0,4689 +01│-0,1312 -00│+0,5267 +00│-0,9248 +01│+0,6121 +01│-0,3691 -00│
│ │
10 │ 10
│ 10 │
10 │ 10
│ 10 │
│ │ │ │ │ │ │ │
│
4 │+0,3143 +01│+0,4167 -01│+0,1825 +01│-0,7927 +01│+0,5737 +01│+0,1412 -00│
│ │
10 │ 10
│ 10 │
10 │ 10
│ 10 │
│ │ │ │ │ │ │ │
│
5 │-0,3291 +01│+0,3353 -01│+0,6081 +00│+0,4205 +01│-0,2308 +01│+0,8789 -01│
│ │
10 │ 10
│ 10 │
10 │ 10
│ 10 │
│ │ │ │ │ │ │ │
│
6 │-0,1453 +01│+0,1058 -01│+0,1508 +01│-0,3222 -00│+0,8345 +00│+0,1093 -00│
│ │
10 │ 10
│ 10 │
10 │ 10
│ 10 │
│ │ │ │ │ │ │ │
│
7 │+0,4667 +08│-0,4263 +05│-0,2408 +05│-0,1136 +05│-0,7315 +04│-0,9218 +04│
│ │
10 │ 10
│ 10 │
10 │ 10
│ 10 │
│ │ │ │ │ │ │ │
│
8 │-0,4263 +05│+0,7659 +04│-0,1551 +05│-0,8961 +03│-0,3165 +03│-0,1438 +02│
│ │
10 │ 10
│ 10 │
10 │ 10
│ 10 │
│ │ │ │ │ │ │ │
│
9 │-0,2408 +05│-0,1551 +05│+0,8171 +07│+0,8529 +04│+0,6423 +04│+0,8594 +04│
│ │
10 │ 10
│ 10 │
10 │ 10
│ 10 │
│ │ │ │ │ │ │ │
│10
│-0,1136 +05│-0,8961 +03│+0,8529 +04│+0,1157 +11│+0,7359 +05│+0,1327 +06│
│ │
10 │ 10
│ 10 │
10 │ 10
│ 10 │
│ │ │ │ │ │ │ │
│11
│-0,7315 +04│-0,3105 +03│+0,6423 +04│+0,7359 +05│+0,8834 +10│+0,1851 +06│
│ │
10 │ 10
│ 10 │
10 │ 10
│ 10 │
│ │ │ │ │ │ │ │
│12
│-0,9218 +04│-0,1438 +02│+0,8594 +04│+0,1327 +06│+0,1851 +06│+0,3809 +07│
│ │
10 │ 10
│ 10 │
10 │ 10
│ 10 │
└───┴────────────┴────────────┴────────────┴────────────┴────────────┴────────────┘
10. Согласно п.
2.11 анализ матрицы податливости ![]() ,
приведенной в табл. 19, свидетельствует об отсутствии в ней обособленных
составляющих.
,
приведенной в табл. 19, свидетельствует об отсутствии в ней обособленных
составляющих.
11. В соответствии
с п. 2.12 вычисление матрицы динамических коэффициентов [A] (18) выполняется на
ЭВМ в виде следующей комбинации:
![]() ,
,
где ![]() , [M] и
[H] - табл. 19, 20 и 21.
, [M] и
[H] - табл. 19, 20 и 21.
12. По п. 2.13
отсутствие обособленных составляющих матрицы податливости ![]() гарантирует отсутствие обособленных
составляющих матрицы [A]. Поэтому задачу по определению частот и форм колебаний
можно решать по полной матрице [A].
гарантирует отсутствие обособленных
составляющих матрицы [A]. Поэтому задачу по определению частот и форм колебаний
можно решать по полной матрице [A].
13. По п. 2.14 для
полной матрицы динамических коэффициентов [A] вычисляются на ЭВМ собственные
значения и векторы решением уравнений (21). Собственные значения определяют
квадраты частот ![]() , а
собственные векторы
, а
собственные векторы ![]() соответствуют коэффициентам форм колебаний.
соответствуют коэффициентам форм колебаний.
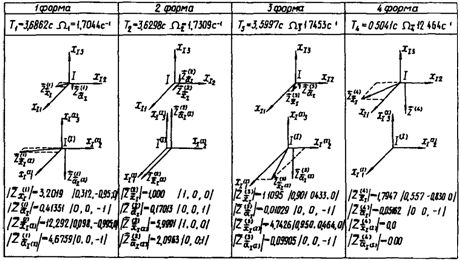
Рис. 10.
Ориентация векторов коэффициентов форм колебаний
14. По п. 2.15 для
каждой формы колебаний все коэффициенты нормируются по значению ![]() ,
принимаемому за единицу.
,
принимаемому за единицу.
Результаты расчета
частот и форм колебаний сведены в табл. 22, составленную
по типу табл. 6.
Графически движение
систем отсчета по первым четырем формам колебаний показано на рис. 10, где
указаны значения модулей векторов и их направляющие косинусы.
15. По п. 2.16
контроль точности решения задач на собственные значения по проверке условий
ортогональности форм в виде матрицы (26) сведен в табл. 23, составленную
по типу табл. 7.
Весь расчет режима
свободных колебаний выполнен по программе, структура которой показана на рис.
1.
Определение
расчетных параметров сейсмического воздействия
16. Согласно п.
2.17 условно, для рассматриваемого примера, примем расчетную
балльность площадки строительства по СНиП II-7-81 равной 8-и баллам, что
соответствует коэффициенту A = 0,2.
Условно для
рассматриваемого примера для площадки строительства примем II категорию
грунтов.
По данным рис. 8, в имеем B = 7 м < 25 м.
Для II категории
грунтов при B < 25 м по (28) или рис. 2 имеем: ![]() .
.
По (27) для 8-и
баллов II категории грунтов при B = 7 м имеем следующее значение инварианта интенсивности ускорения поступательного движения
сейсмического воздействия
![]() .
.
17. По п. 2.18 для
принятой II категории грунтов площадки строительства имеем: ![]() .
.
Для B = 7 м < 25
м для II категории грунтов по (30) или графику рис. 3 имеем ![]() .
.
По (29) для II
категории грунтов при B = 7 м имеем следующее значение инварианта
относительной интенсивности углового ускорения вращения сейсмического
воздействия
![]() .
.
18. По п. 2.19 для
II категории грунтов имеем: ![]() .
.
Для B = 7 м < 25
м и II категории грунтов по (32) или графику рис. 4 имеем: ![]() .
.
По (31) для II категории
грунтов при B = 7 м имеем следующее значение относительной величины
интенсивности инварианта углов вращения сейсмического воздействия:
![]() .
.
19. Согласно п.
2.20 для II категории грунтов по данным табл. 8 имеем: ![]() .
.
Сооружение
выполнено из металлических конструкций, для которых значение коэффициента
потерь энергии ![]() .
Учитывая наличие многих конструктивных демпферов в сооружении, примем для
расчета
.
Учитывая наличие многих конструктивных демпферов в сооружении, примем для
расчета ![]() . Тогда
по данным табл. 9 и 10 имеем:
. Тогда
по данным табл. 9 и 10 имеем: ![]() ;
; ![]() ;
; ![]() .
.
Значения периодов
собственных колебаний даны в табл. 22.
Значения
нормированных коэффициентов динамичности ускорения поступательного движения для
II категории грунта ![]() определяются по графикам рис. 5 или
вычисляются по (35). Эти значения нормированных коэффициентов динамичности
сведены в табл. 24.
определяются по графикам рис. 5 или
вычисляются по (35). Эти значения нормированных коэффициентов динамичности
сведены в табл. 24.
Таблица 24
Значения
коэффициентов динамичности векторов ![]() ,
, ![]() и
и ![]()
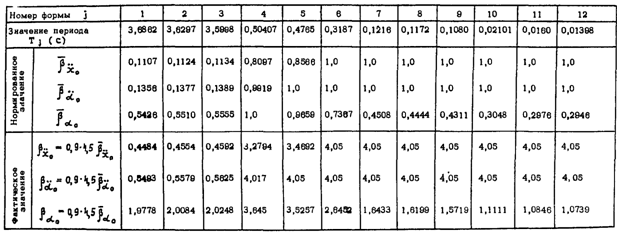
Значения
нормированных коэффициентов динамичности углового ускорения ![]() и углов вращения
и углов вращения ![]() определяются по графикам рис. 6 и 7 или
вычисляются по (31) и (40). Эти значения сведены в табл. 24.
определяются по графикам рис. 6 и 7 или
вычисляются по (31) и (40). Эти значения сведены в табл. 24.
Фактические
(ненормированные) значения коэффициентов динамичности вычисляются по (33), (37)
и (39) с учетом конкретных грунтовых условий - ![]() и заданных коэффициентов потерь энергии -
и заданных коэффициентов потерь энергии - ![]() ,
, ![]() и
и ![]() . Эти
значения коэффициентов динамичности также сведены в табл. 24.
. Эти
значения коэффициентов динамичности также сведены в табл. 24.
20. В
рассматриваемом примере отсутствуют данные по конкретной сейсмологической
обстановке. Поэтому для сравнения вариантов расчета примем по п. 2.21 следующие
группы проверочных значений направляющих косинусов векторов сейсмического
воздействия.
1. Вектор ![]() направлен по оси
направлен по оси ![]() (см. рис. 9), а векторы
(см. рис. 9), а векторы ![]() и
и ![]() равны нулю:
равны нулю:
![]() ;
; ![]() (i = 1, 2, 3).
(i = 1, 2, 3).
2. Вектор ![]() направлен по оси
направлен по оси ![]() (см. рис. 9), а векторы
(см. рис. 9), а векторы ![]() и
и ![]() равны нулю:
равны нулю:
![]() ;
; ![]() (i = 1, 2, 3).
(i = 1, 2, 3).
3. Вектор ![]() направлен по оси
направлен по оси ![]() (см. рис. 9), а векторы
(см. рис. 9), а векторы ![]() и
и ![]() равны нулю:
равны нулю:
![]() ;
; ![]() (i = 1, 2, 3).
(i = 1, 2, 3).
4. Вектор ![]() направлен по оси
направлен по оси ![]() (см. рис. 9), а векторы
(см. рис. 9), а векторы ![]() и
и ![]() равны нулю:
равны нулю:
![]() ;
; ![]() (i = 1, 2, 3).
(i = 1, 2, 3).
5. Вектор ![]() направлен по оси
направлен по оси ![]() (см. рис. 9), а векторы
(см. рис. 9), а векторы ![]() и
и ![]() равны нулю:
равны нулю:
![]() ;
; ![]() (i = 1, 2, 3).
(i = 1, 2, 3).
Основные расчетные
значения направляющих косинусов вычисляются по (44) - (51). Для
значений коэффициентов форм колебаний, приведенных в табл. 5, расчетные
значения направляющих косинусов ![]() ,
, ![]() и
и ![]() даны в табл. 25, составленной по форме табл.
11.
даны в табл. 25, составленной по форме табл.
11.
Таблица 25
Значения
направляющих косинусов векторов ![]() ,
, ![]() и
и ![]()
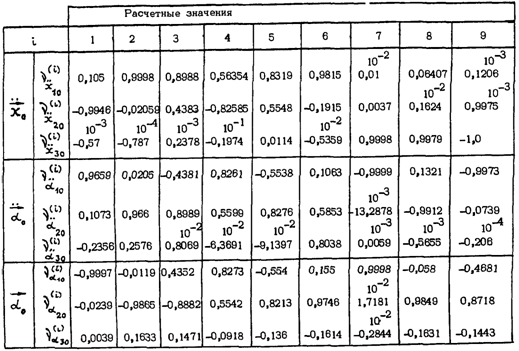
Продолжение табл.
25

Расчет
режима вынужденных колебаний
По п. 2.22 для всех
групп направляющих косинусов (см. табл. 25) и всех форм колебаний (см. табл.
24) по (52) определяются коэффициенты динамичности отдельных форм ![]() .
Результаты этих вычислений сведены в табл. 26. В табл. 27 даны отношения
.
Результаты этих вычислений сведены в табл. 26. В табл. 27 даны отношения ![]() .
.
Таблица 26
Коэффициенты
динамичности отдельных форм колебаний ![]()
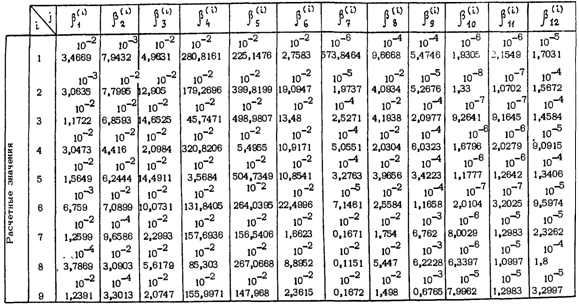
Продолжение табл.
26
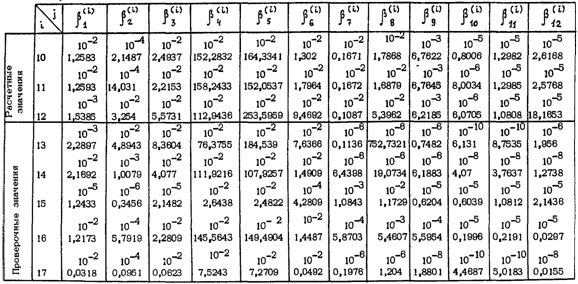
Таблица 27
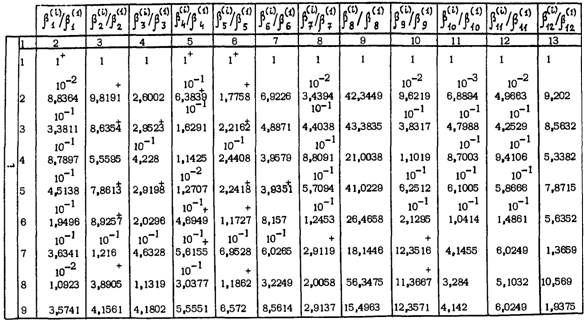
Продолжение табл.
27
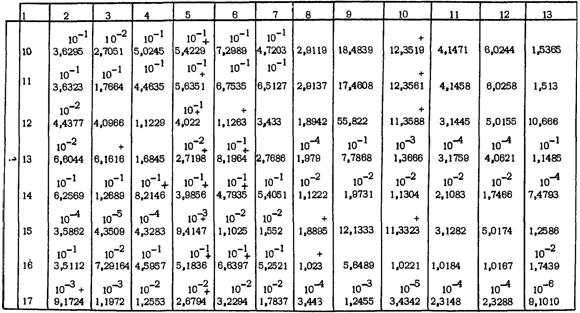
22. Поскольку
расчет упругой системы выполнялся по методу сил и внутренние усилия в
поперечных сечениях определялись от единичной нагрузки (см. табл. 18), то согласно
п. 2.23 основными расчетными параметрами являются величины сейсмических сил и
моментов, которые вычисляются по (52).
Рассматриваемое
сооружение (см. рис. 8 и 9) не является крупным и уникальным энергетическим
объектом, поэтому, допуская в нем образование местных пластических деформаций
[14], примем значение K = 0,25.
Значения
сейсмических сил и моментов, вычисленные по (52) для всех ориентаций векторов
сейсмического воздействия и для всех форм колебаний, сведены в табл. 28, составленную по форме табл. 13.
Таблица 28
Сейсмические силы и
моменты
┌──────────────┬────────────────────────────────────────────────────────────────────────────────────────┐
│1
N ориентации│
1 │
├──────────────┼───────┬───────────────┬───────────────┬────────────────┬───────────────┬───────────────┤
│2
N формы │ 1
│ 2 │ 3
│ 4 │ 5
│ 6 │
├──┬───┬───────┴───────┼───────────────┼───────────────┼────────────────┼───────────────┼───────────────┤
│ │
│ -2│ -3│ -2│ -2│ -2 │ -2│
│3
│1 │ 3,6402 x 10
│ 8,3404 x 10 │
5,2112 x 10 │ 294,8569 x 10 │236,405 x 10 │
2,8962 x 10 │
│ │
│ -2│ -4│ -2│ -2│ -2 │ -3│
│ │2
│-11,0496 x 10 │
-4,6873 x 10 │ 2,5024 x 10
│-439,5432 x 10
│159,337 x 10 │
-4,6774 x 10 │
│ │
│ -4│ -7
│ -5│ -5│ -5 │ -6│
│ │3
│ -3,3822 x 10 │
-8,34 x 10 │ 9,3802 x 10
│-589,7138 x 10
│189,124 x 10 │
-5,7924 x 10 │
│ │
│ │ │ │ │ │ │
│ │
│ -4│ -7│ -5│ -3│ -4│ -5│
│4
│1 │ -5,7238 x 10 │ -6,5571 x 10 │ 16,3882 x 10 │
20,8632 x 10 │ 74,3437 x
10 │ 3,4153 x 10
│
│ │
│ -5│ -6 │ -6 │ -3│ -3│ -5 │
│ │2
│ 8,9644 x 10 │-10,269 x 10 │-21,396 x 10 │
14,5221 x 10 │ 11,6433 x
10 │ 19,019 x 10 │
│ │
│ -2│ -3 │ -3│ -1│ -1│ -1│
│ │3
│-17,8961 x 10 │
16,896 x 10 │ -6,1493 x 10 │ -18,1407 x 10 │ -9,7534 x 10 │
6,1436 x 10 │
│ │
│ │ │ │ │ │ │
│ │
│ -1│ -1│ -1│ -1│ -2│ -4│
│5
│1 │ 4,3318 x 10
│ 4,5563 x 10 │ 22,9275 x 10 │
-6,9944 x 10 │ 50,7708 x
10 │-77,4668 x 10 │
│ │
│ │ -3│ -1│ -1│ -2│ -4│
│ │2
│ -4,3382 │
-9,0862 x 10 │ 11,1847 x 10 │
10,9953 x 10 │-35,5395 x
10 │ 5,3718 x 10
│
│ │
│ -3 │ -6│ -1│ -2│ -2│ -4│
│ │3
│ -2,167 x 10 │
-2,4425 x 10 │ 0,5087 x 10
│ -7,1959 x 10 │
2,3078 x 10 │ 2,1309 x 10
│
│ │
│ │ │ │ │ │ │
│ │
│ -4│ -7│ -5│ -3│ -3│ -5│
│6
│1 │ -6,5823 x 10 │-13,1142 x 10 │ 20,4852 x 10 │
30,1358 x 10 │-11,1516 x
10 │ 4,5539 x 10
│
│ │
│ -5 │ -6│ -5│ -3│ -3│ -5│
│ │2
│ 4,482 x 10 │-30,8077 x 10 │-12,8331 x 10 │
18,1526 x 10 │ 14,554 x
10 │ 42,7928 x 10 │
│ │
│ │ -1│ -2│ -2│ -2│ -2│
│ │3
│ -2,0237 │ 2,0822 x 10
│ -5,8907 x 10 │ 13,7117 x 10
│ 8,1747 x 10 │ -1,2051 x 10 │
│ │
│ │ │ │ │ │ │
│ │
│ -6│ -4│ -4│ -6 │ -6│ -5│
│3
│1 │602,5387 x 10 │ 10,1501 x 10 │
5,7483 x 10 │ 2,027 x 10
│ 2,2626 x 10 │
1,7882 x 10 │
│ │
│ -3│ -5│ -4│ -4│ -4│ -7 │
│ │2
│-35,0147 x 10 │ 5,8059 x 10
│ 6,0565 x 10 │
-1,0256 x 10 │ -0,9855 x
10 │ 1,055 x 10
│
│ │
│ -2│ -3│ -1│ -1│ -1│ -4│
│ │3 │
5,3808 x 10 │ 1,3348 x 10
│ -2,9582 x 10 │ 1,1332 x 10
│ 0,8859 x 10 │ -3,1859 x 10 │
│ │
│ │ │ │ │ │ │
│ │
│ │ -3│ -1│ -1│ -1│ -4│
│4
│1 │ -1,1148 │
3,3476 x 10 │ 2,5734 x 10
│ 2,5425 x 10 │ -3,2172 x 10 │
2,7331 x 10 │
│ │
│ -4│ -2│ -3│ -3│ -3│ -2│
│ │2
│ -7,2186 x 10 │
-1,2898 x 10 │ -8,3493 x 10 │
-2,6447 x 10 │ -3,6827 x
10 │ -4,8518 x 10 │
│ │
│ -3│ -4│ -4│ -6│ -6│ -5│
│ │3
│ 1,2206 x 10 │
7,4067 x 10 │ 5,7576 x 10
│ -7,3766 x 10 │
0,6152 x 10 │ -1,9361 x
10 │
│ │
│ │ │ │ │ │ │
│ │
│ -4│ -4│ -4│ -6│ -6│ -5│
│5
│1 │ -2,2704 x 10 │ -3,2698 x 10 │ -1,6161 x 10 │
-0,3364 x 10 │ -0,2054 x
10 │ -0,2217 x 10 │
│ │
│ -4│ -4│ -4 │ -6│ -6│ -8│
│ │2
│137,2253 x 10 │
-0,4062 x 10 │ 28,119 x 10 │
-9,6583 x 10 │ 10,1007 x
10 │ -0,3491 x 10 │
│ │
│ │ -4│ │ -2 │ -2│ -5│
│ │3
│ 3,5321 │+93,8629 x 10 │ -3,1302 │
-9,668 x 10 │ -6,3228 x
10 │ 14,6916 x 10 │
│ │
│ │ │ │ │ │ │
│ │
│ │ -3 │ -1│ -2│ -3 │ -6│
│6
│1 │ -1,6801 │
4,531 x 10 │ -2,8058 x 10 │
-1,6457 x 10 │ 6,975 x 10
│ 7,1411 x 10 │
│ │
│ -2│ -2│ -2│ -6 │ -5│ -4│
│ │2
│ -1,5526 x 10 │
-2,3276 x 10 │ -1,3754 x 10 │
4,178 x 10 │ 4,2161 x 10
│ 9,7109 x 10 │
│ │
│ -5│ -6│ -6│ -8│ -8│ -8│
│ │3
│ -8,6833 x 10 │ 5,4463 x 10
│ 11,6521 x 10 │ 16,9189 x 10
│ -5,1261 x 10 │ 6,3968 x 10
│
└──┴───┴───────────────┴───────────────┴───────────────┴────────────────┴───────────────┴───────────────┘
Определение
расчетных значений внутренних усилий
от сейсмической
нагрузки в проверяемых сечениях
несущей конструкции
23. Согласно п.
2.25 по данным пп. 2.7 и 2.23 по (55) выполняется корректировка единичных
внутренних усилий, приведенных в табл. 18, на фактические величины сейсмических
сил и моментов, значения которых даны в табл. 29. Результаты этой корректировки
сведены в табл. 29, составленную по форме табл. 15.
Таблица 29
Внутренние
усилия в узле 1 конечного элемента 1 - 7
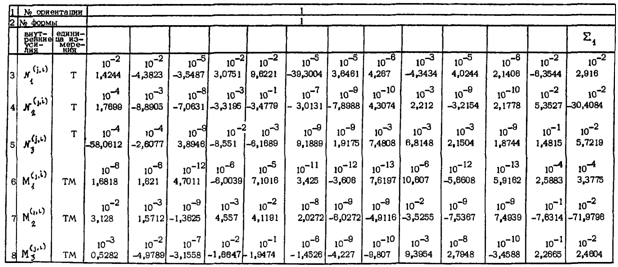
Продолжение табл.
29
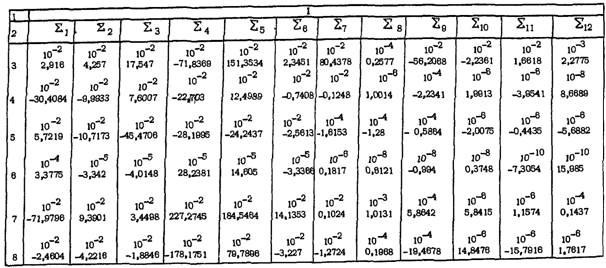
Продолжение табл.
29
Внутренние усилия в
узле 7 конечного элемента 7 - 8
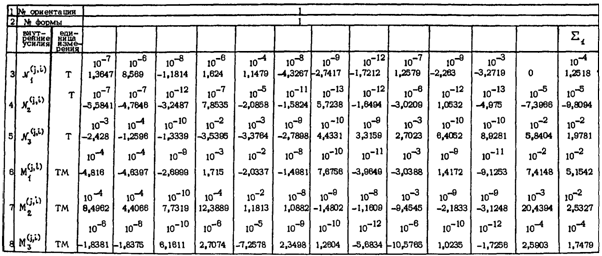
Продолжение табл.
29
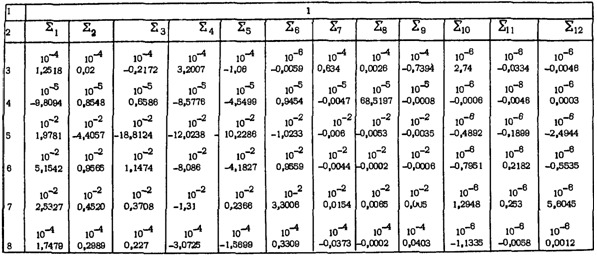
24. Согласно п.
2.27 значения внутренних усилий, соответствующие отдельным формам колебаний,
для каждой ориентации векторов сейсмического воздействия (см. табл. 29)
вычисляются как средние квадратичные (57) расчетные значения внутренних усилий
в проверяемых сечениях типичных несущих конструкций. Эти расчетные значения
усилий сведены в табл. 30.
Таблица 30
Расчетные значения
внутренних усилий
в узле 1 конечного
элемента 1 - 7
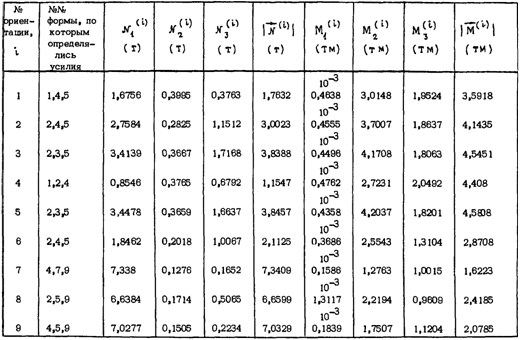
Продолжение табл.
30

Продолжение табл.
30
Расчетные значения
внутренних усилий
в узле 7 конечного
элемента 7 - 8
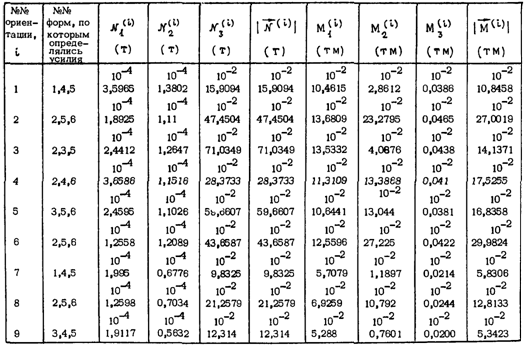
Продолжение табл.
30
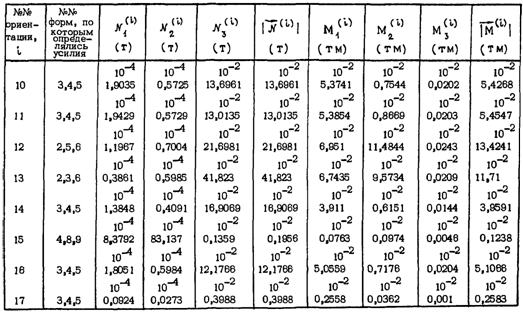
25. По п. 2.28 из
расчетных значений внутренних усилий, соответствующих различным ориентациям
векторов сейсмического воздействия, выбираются максимальные значения, по
которым в сочетании с усилиями от других нагрузок уточняется прочность
рассматриваемых сечений. Соответствующие этим максимальным значениям усилий
направляющие косинусы векторов сейсмического воздействия сведены в табл. 31.
Таблица 31
Значение
направляющих косинусов опасной ориентации векторов
сейсмического
воздействия для проверяемых сечений
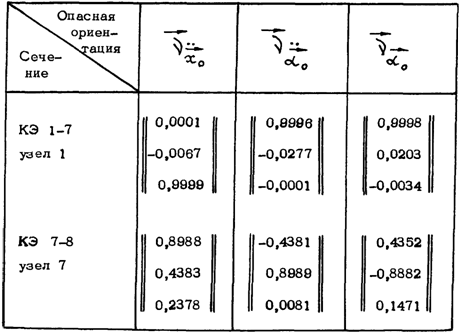
Приложение
2
ОСНОВНЫЕ ПОЛОЖЕНИЯ
РАСЧЕТА ПО ОПРЕДЕЛЕНИЮ
СЕЙСМИЧЕСКОЙ
НАГРУЗКИ НА СООРУЖЕНИЯ С ПОДВЕШЕННЫМИ
МАССАМИ И УЧЕТОМ
ПРОСТРАНСТВЕННОГО ХАРАКТЕРА
ВОЗДЕЙСТВИЯ И
РАБОТЫ КОНСТРУКЦИЙ
Упругогравитационные
колебания сооружений с подвешенными массами при сейсмических воздействиях
рассмотрены в работах [3, 4]. Алгоритм расчета может иметь некоторые вариации в
зависимости от полноты учета параметров поля сейсмических движений грунта,
способа представления информации о векторах сейсмического воздействия и учета
корреляционных связей различного типа. В настоящих Рекомендациях
рассматривается наиболее простой вариант расчета.
Для выполнения
расчетов необходимо сформулировать расчетные динамические модели (РДМ)
сооружений с подвешенными массами и модели сейсмического воздействия, а также
определить параметры этих моделей.
Расчетные
динамические модели сооружений
с подвешенными
массами и их параметры
В настоящих
Рекомендациях в основу расчетов приняты дискретные динамические модели [7, 11],
движение масс которых описывается обыкновенными линейными дифференциальными
уравнениями. Дискретные РДМ основаны на выделении отдельных конструкций, частей
сооружения и представлении их абсолютно твердыми элементами (точками, дисками,
телами), жесткость которых считается на порядок превышающей жесткость
оставшихся частей сооружения, которые в РДМ выполняют роль
упругих деформируемых безинерционных связей, соединяющих абсолютно твердые
элементы. Специфика формирования РДМ сооружений с подвешенными массами состоит
в том, что выделяется ряд твердых несущих элементов, к которым подвешивается
некоторая совокупность масс (материальных точек, твердых дисков, тел).
Вопрос в том, какие
части сооружения в расчетах считать абсолютно твердыми и недеформируемыми, а
какие конструкции принимать упругими безинерционными, является неоднозначным.
По оценке деформации сооружения в целом и влиянию на ее величину и характер ее
составляющих можно судить о соотношении жесткостей отдельных конструкций.
При этом следует
учитывать, что если какая-то часть сооружения принимается абсолютно твердой в
расчетной модели, то в расчетах она считается недеформируемой и в ней
невозможно определить внутренние усилия. Следовательно, если в расчетах
отсутствует необходимость проверки прочности какого-то элемента и очевидно, что
жесткость его довольно высока в сравнении с жесткостью упругих конструкций, то
в расчетной модели этот элемент целесообразно принять за абсолютно твердую
массу.
Дополнительным
обстоятельством, поясняющим выбор РДМ сооружения, является то, что динамические
расчеты основываются на статических расчетах сооружения, при которых
выполняется построение матриц жесткости и податливости. Расчетные статическая и
динамическая модели сооружения могут отличаться друг от друга. Расчетная
статическая модель (РСМ) сооружения может быть более подробной. В ней все
элементы могут приниматься деформируемыми. При
переходе к РДМ сооружения ряд деформируемых элементов может объединяться в
группу в виде твердой массы. Перемещения (углы вращения) этой массы в виде
соответствующих компонент матрицы жесткости или податливости будут определяться
с учетом деформативных свойств элементов, представляющих в динамической модели
твердую массу. Такое укрупнение часто применяется в расчетах, основанных на
методе конечного элемента. С учетом подробного анализа деформативных свойств
определяются необходимые перемещения и углы поворота (вращения), из которых
компонуется матрица жесткости или податливости небольшого порядка. Такая
матрица удобно разрешается в динамических расчетах. Этот прием получил широкое
распространение в автоматизированных системах расчета, но его применение
требует определенной осторожности.
Критерием
достоверности принимаемой РДМ является устойчивость результатов расчета,
получаемых по некоторым ее разновидностям.
Приведенные здесь
сведения поясняют п. 2.2 алгоритма.
После выделения в
сооружении условно недеформируемых элементов, несущих массу, и податливых
элементов, моделирующих упругие связи, возникает вопрос: каким образом
представить в динамической модели массу того или иного жесткого элемента? В
механике известны три модели представления массы: материальная точка, твердый
диск и твердое тело. В соответствии с критериями формирования расчетных
динамических моделей [11], они подразделяются на одно-, двух- и трехмерные, в
зависимости от траекторий движения точек масс модели. На вопрос о том, когда
какой вид массы следует принять, могут быть даны следующие рекомендации.
Материальная точка
характеризуется только величиной массы и не имеет размеров. При моделировании
жесткого элемента сооружения материальной точкой (допустим, подвешенного
теплоагрегата), исключается возможность учесть геометрию распределения массы в
этом элементе, так же как исключается возможность учесть геометрию
распределения упругих связей (допустим, подводящих и отводящих коммуникаций,
несущих подвесок теплоагрегата), наложенных на агрегат. В этом случае в РДМ все
упругие связи, несущие агрегат, могут только интегрально (условно) быть
отображены в виде упругого стержня с точечным поперечным сечением, т.е. осью
такого стержня.
Учет геометрии
распределения массы в жестком (недеформируемом) элементе и учет геометрии
распределения упругих связей, несущих этот элемент, может быть выполнен только
при представлении такого жесткого элемента в виде твердого тела или его
частного случая - твердого диска (см. п. 2.3).
Твердым диском
моделировать жесткий элемент следует в том случае, когда описывается
плоскопараллельное движение рассматриваемого элемента. Примером является
плоскопараллельное движение в горизонтальной плоскости дисков подвешенных
перекрытий здания или плоскопараллельное движение подвешенных теплоагрегатов в
вертикальных плоскостях. Диск отличается от тела тем, что он имеет два линейных
размера, тогда как у тела их три. Твердый диск имеет три степени свободы.
Расчетные динамические модели сооружения с твердыми дисками являются
двухмерными [11] и относятся к одному из частных случаев пространственных
систем. Поскольку диск имеет два линейных размера, то он позволяет учесть
геометрию распределения массы по диску, а также предоставляет возможность учесть
геометрию распределения в плоскости диска упругих связей. Инерционные параметры
диска определяются величиной массы ![]() ,
которая вычисляется в соответствии с требованиями п. 2.2 СНиП II-7-81 [16], и
моментом инерции массы m относительно оси, перпендикулярной плоскости диска и
проходящей через его центр масс. Координаты центра масс диска и его момент
инерции следует вычислять, используя справочные данные [1].
,
которая вычисляется в соответствии с требованиями п. 2.2 СНиП II-7-81 [16], и
моментом инерции массы m относительно оси, перпендикулярной плоскости диска и
проходящей через его центр масс. Координаты центра масс диска и его момент
инерции следует вычислять, используя справочные данные [1].
Если принятый
жесткий элемент имеет один порядок всех трех линейных размеров, то такой
элемент следует моделировать твердым телом. Твердое тело позволяет учесть
геометрию распределения массы и несущих упругих связей в пространстве.
Инерционные параметры твердого тела характеризуются величиной массы m и
тензором инерции, который в общем случае представляет матрицу моментов инерции
массы
где ![]() - осевые (при i = j) и центробежные (при
- осевые (при i = j) и центробежные (при ![]() ) моменты инерции массы тела относительно заданных осей.
) моменты инерции массы тела относительно заданных осей.
В главных и
центральных осях инерции тела центробежные моменты инерции равны нулю и тензор
(58) принимает вид диагональной матрицы
![]() . (59)
. (59)
В этом случае
требуется вычислять только три осевых момента инерции массы тела ![]() (i = 1, 2, 3). Положение центра масс (центра
тяжести) и ориентация в пространстве главных и центральных осей и осевые
моменты инерции
(i = 1, 2, 3). Положение центра масс (центра
тяжести) и ориентация в пространстве главных и центральных осей и осевые
моменты инерции ![]() определяются по справочным данным [1, 14].
определяются по справочным данным [1, 14].
Рассматриваемые
алгоритмы расчета построены так, что всегда необходимо в качестве осей отсчета
принимать только главные и центральные оси инерции массы тел.
В рассматриваемых
алгоритмах, согласно п. 2.3, допускается применять в РДМ любой вид масс с
учетом приведенных выше данных. При этом РДМ должны быть как минимум
двухмерными. Принятая РДМ сооружения одновременно
может содержать все виды масс: точки, диски, тела.
Модели несущих
конструкций применяются в виде упругих стержней различного типа с заданными
размерами поперечных сечений, пластин и др. деформируемых элементов. Выбор этих
моделей определяется принятыми массами и требованиями статического расчета
(например, условиями их разбиения на конечные элементы при использовании
известных автоматизированных систем расчета) рассматриваемой системы при
формировании матриц жесткости или податливости.
В данных
Рекомендациях принят следующий способ описания движения рассматриваемых
динамических систем:
1. Вектор ускорения
поступательного движения основания сооружения ![]() определяется в каких-либо инерциальных осях
отсчета
определяется в каких-либо инерциальных осях
отсчета ![]() .
.
2. Векторы углового
ускорения ![]() и углов вращения основания
и углов вращения основания ![]() определяются в осях отсчета, неизменно
связанных с основанием,
определяются в осях отсчета, неизменно
связанных с основанием, ![]() . Это
вращение определяется поворотами осей
. Это
вращение определяется поворотами осей ![]() относительно осей
относительно осей ![]() .
.
3. Перемещения
центров масс всех тел (несущих и подвешенных) для рассматриваемой
упругогравитационной системы определяется в системе осей основания ![]() векторами
векторами ![]() (k = I, II, ..., n - число несущих тел) или
(k = I, II, ..., n - число несущих тел) или ![]() (
(![]() - число
масс, подвешенных к k-му несущему телу). Векторы
- число
масс, подвешенных к k-му несущему телу). Векторы ![]() или
или ![]() определяются своими компонентами
(составляющими) по осям
определяются своими компонентами
(составляющими) по осям ![]() .
.
4. Вращение всех
тел (несущих и подвешенных) для рассматриваемой упругогравитационной системы
определяется векторами ![]() и
и ![]() в соответствующих главных и центральных осях
инерции масс этих тел
в соответствующих главных и центральных осях
инерции масс этих тел ![]() и
и ![]() .
Векторы
.
Векторы ![]() и
и ![]() определяются в осях
определяются в осях ![]() и
и ![]() своими компонентами (составляющими). Эти
вращения определяются поворотами осей
своими компонентами (составляющими). Эти
вращения определяются поворотами осей ![]() или
или ![]() относительно осей основания
относительно осей основания ![]() .
.
Состояние покоя
расчетной динамической модели для данного способа описания движения
определяется так же.
Согласно п. 2.5 для
определения вектора ускорения поступательного движения сейсмического
воздействия вводится инерциальная система отсчета ![]() без привязки ее начала отсчета. В качестве нее
может быть принята ориентация по странам света или какая-либо другая система
трех ортогональных направлений.
без привязки ее начала отсчета. В качестве нее
может быть принята ориентация по странам света или какая-либо другая система
трех ортогональных направлений.
По п. 2.5
для определения векторов углового ускорения и углов вращения сейсмического
воздействия вводится система отсчета, связанная с подвижным основанием
(фундаментом) ![]() , в
качестве которой рекомендуется принимать главные оси сооружения.
, в
качестве которой рекомендуется принимать главные оси сооружения.
Согласно п. 2.5 в
РДМ устанавливается однозначно и произвольно нумерация всех масс (точек,
дисков, твердых тел). Вся нумерация масс выполняется римскими цифрами. Все
несущие массы нумеруются следующим образом: I, II, III, ..., k, ... n.
Нумерация всех подвешенных масс выполняется римскими цифрами с индексами в виде
номера несущего тела: ![]() ,
, ![]() ,
, ![]() , ...,
, ..., ![]() , ...,
, ..., ![]() . Тогда
общее число всех масс в системе равно:
. Тогда
общее число всех масс в системе равно: ![]() .
Принятую произвольно нумерацию масс необходимо сохранять на всех этапах
расчета.
.
Принятую произвольно нумерацию масс необходимо сохранять на всех этапах
расчета.
В соответствии с п.
2.5 с каждой массой (несущие или подвешенные тела, диски, точки) связывается
своя система отсчета ![]() (k = I, II, ... n) или
(k = I, II, ... n) или ![]()
![]() . Для
дисков или тел эти оси должны быть главными и центральными осями инерции масс.
Таким образом, реальная динамическая модель на этапе геометрического описания
заменяется совокупностью осей отсчета, как показано на рис. 11, и задача
сводится к описанию взаимного положения этих осей в пространстве
как в состоянии покоя, так и в движении при сейсмическом воздействии. В
состоянии покоя эта задача выполняется в соответствии с требованиями п. 2.5
настоящих Рекомендаций.
. Для
дисков или тел эти оси должны быть главными и центральными осями инерции масс.
Таким образом, реальная динамическая модель на этапе геометрического описания
заменяется совокупностью осей отсчета, как показано на рис. 11, и задача
сводится к описанию взаимного положения этих осей в пространстве
как в состоянии покоя, так и в движении при сейсмическом воздействии. В
состоянии покоя эта задача выполняется в соответствии с требованиями п. 2.5
настоящих Рекомендаций.
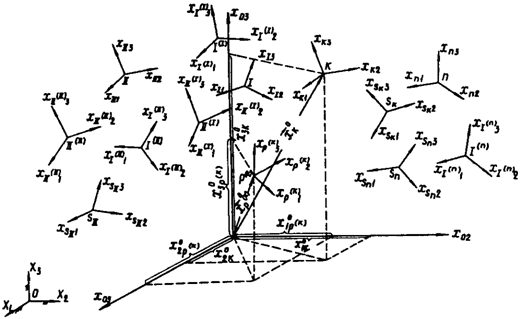
Рис. 11.
Совокупность систем осей, вводимая
в расчетную
динамическую модель сооружения
![]() - инерциальные оси;
- инерциальные оси; ![]() - оси, неизменно
- оси, неизменно
связанные с подвижным основанием; ![]()
(k = I, II, III,
..., n) - оси, неизменно связанные
с k-ым телом; ![]()
![]() - оси,
- оси,
неизменно связанные
с ![]() -ной
подвешенной массой
-ной
подвешенной массой
Согласно п. 2.5
определяются положения начал отсчета всех введенных осей ![]() и
и ![]() . Это
определение выполняется вычислением значений компонент векторов
. Это
определение выполняется вычислением значений компонент векторов ![]() и
и ![]() в осях отсчета
в осях отсчета ![]() , где
, где ![]() и
и ![]() - координаты точек k и P по осям
- координаты точек k и P по осям ![]() (i = 1, 2 3) (см. рис. 11).
(i = 1, 2 3) (см. рис. 11).
Относительная
ориентация всех введенных систем осей отсчитывается от инерциальных осей и
определяется в заданной последовательности согласно п. 2.5 операторами
взаимосвязи между ортами (единичными векторами) этих осей (1) - (3). Правила
формирования операторов (1) - (3) одинаковы, поэтому проиллюстрируем их
применительно к определению пространственной ориентации некоторых осей ![]() относительно других осей
относительно других осей ![]() . На рис.
12 показаны эти оси, применительно к которым операторы (1) - (3) имеют
следующий вид:
. На рис.
12 показаны эти оси, применительно к которым операторы (1) - (3) имеют
следующий вид:
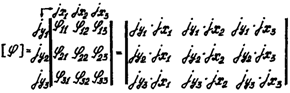 , (60)
, (60)где ![]() (i, k = 1, 2, 3) - скалярные произведения
единичных векторов
(i, k = 1, 2, 3) - скалярные произведения
единичных векторов ![]() и
и ![]() (орты осей
(орты осей ![]() и
и ![]() ,
соответственно); точкой отмечен знак скалярного произведения.
,
соответственно); точкой отмечен знак скалярного произведения.
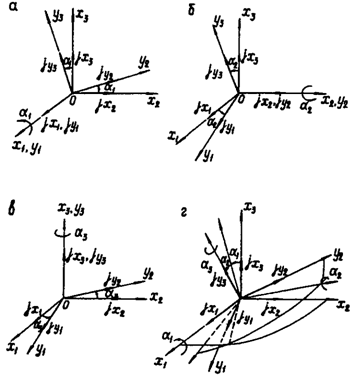
Рис. 12.
Схемы углов поворота систем осей
![]() относительно осей
относительно осей ![]()
а - поворот
относительно оси ![]() на угол
на угол ![]() ; б
- поворот
; б
- поворот
относительно оси ![]() на угол
на угол ![]() ; в -
поворот относительно
; в -
поворот относительно
оси ![]() на угол
на угол ![]() ; г - три последовательных
; г - три последовательных
поворота на углы ![]() ,
, ![]() и
и ![]() (кардановы углы)
(кардановы углы)
Скалярные
произведения ![]() (компоненты матрицы (60)) представляют
проекцию единичного вектора
(компоненты матрицы (60)) представляют
проекцию единичного вектора ![]() на направление вектора
на направление вектора ![]() , т.е.
, т.е.
где ![]() - косинус угла между векторами
- косинус угла между векторами ![]() и
и ![]() .
.
На рис. 12
приведены схемы, поясняющие вычисления компонент матрицы (60) при различных
вращениях осей. На схемах рис. 12, а, б показаны
повороты системы осей относительно первой, второй и третьей осей на углы ![]() ,
, ![]() и
и ![]() ,
соответственно.
,
соответственно.
При повороте на
угол ![]() относительно оси
относительно оси ![]() матрица (60) имеет следующий вид:
матрица (60) имеет следующий вид:
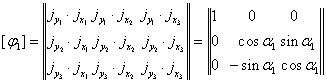 . (62)
. (62)При повороте на
угол ![]() относительно оси
относительно оси ![]() (см. рис. 12, б) матрица (60) имеет следующие
компоненты:
(см. рис. 12, б) матрица (60) имеет следующие
компоненты:
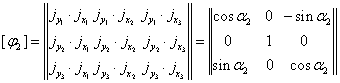 . (63)
. (63)При повороте на
угол ![]() относительно оси
относительно оси ![]() (см. рис. 12, в) матрица (60) имеет значения:
(см. рис. 12, в) матрица (60) имеет значения:
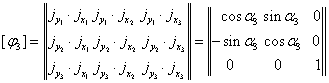 . (64)
. (64)На рис. 12, г
показана схема трех последовательных поворотов осей ![]() относительно осей
относительно осей ![]() . В
этом случае от орт осей
системы
. В
этом случае от орт осей
системы ![]() к ортам осей
к ортам осей ![]() переход выполняется последовательным
произведением матриц (62) - (64)
переход выполняется последовательным
произведением матриц (62) - (64)
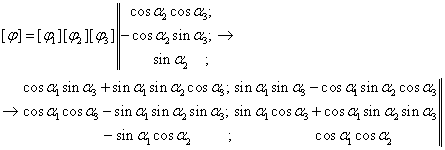 . (65)
. (65)Аналогично матрица ![]() вычисляется при двух любых последовательных
поворотах.
вычисляется при двух любых последовательных
поворотах.
На практике часто
встречаются оси, повернутые друг относительно друга только по вертикальной оси.
Как правило, таковы оси инерациальной системы отсчета ![]() (см. п. 2.5) и главные оси сооружения,
связанные с основанием,
(см. п. 2.5) и главные оси сооружения,
связанные с основанием, ![]() (см. п. 2.5). Поэтому матрица
(см. п. 2.5). Поэтому матрица ![]() (58) практически всегда определяется в виде
(64).
(58) практически всегда определяется в виде
(64).
Для большинства
сооружений главные центральные оси инерции масс РДМ также имеют вертикально
ориентированные третьи оси, т.е. в большинстве случаев матрица ![]() (59) и
(59) и ![]() (60) (см. п. 2.5) также вычисляются по (64).
Однако, если сооружение несет большие
сконцентрированные технологические массы, то их отдельные главные центральные
оси могут быть ориентированы в пространстве различным образом. В этих случаях
при определении
(60) (см. п. 2.5) также вычисляются по (64).
Однако, если сооружение несет большие
сконцентрированные технологические массы, то их отдельные главные центральные
оси могут быть ориентированы в пространстве различным образом. В этих случаях
при определении ![]() (2) и
(2) и ![]() (3) необходимо исходить из данных (62), (63),
(64) и схемы (65). Можно также применять результаты непосредственных значений
углов между осями и вычислять компоненты
(3) необходимо исходить из данных (62), (63),
(64) и схемы (65). Можно также применять результаты непосредственных значений
углов между осями и вычислять компоненты ![]() (2) и
(2) и ![]() (3) по (61). Всегда необходимо иметь в виду,
что компоненты этих матриц должны удовлетворять следующим условиям нормировки:
(3) по (61). Всегда необходимо иметь в виду,
что компоненты этих матриц должны удовлетворять следующим условиям нормировки:
![]() ; (66)
; (66)
![]() . (67)
. (67)
Первое условие
определяет единичную величину модуля орт осей ![]() , а
второе - ортогональность этих орт.
, а
второе - ортогональность этих орт.
Необходимо также
иметь в виду, что если рассматриваемые оси одинаково ориентированы в
пространстве, то (60) принимает вид единичной матрицы, которую можно получить
по (62) - (65) при нулевых значениях соответствующих углов ![]() .
.
Описание
упругих свойств
расчетной
динамической модели сооружения
Для динамических
расчетов необходимо знать жесткости сооружений, которые определяются расчетом
по соответствующим статическим моделям. Статическая модель может быть более
подробной, чем динамическая. Однозначное соответствие статической и
динамической моделей состоит только в том, что статическая модель должна
допускать возможность определения жесткостей по соответствующим направлениям
движения масс в принятой динамической модели.
Существует большое
число статических методов расчета: метод сил, метод перемещений, метод конечных
элементов и конечных разностей и т.д. На основе этих методов разработаны
системы автоматизированных расчетов сооружений на ЭВМ. В настоящих
Рекомендациях эти методы не рассматриваются. Здесь приводятся отдельные
сведения статического расчета, которые необходимы для выполнения динамических
расчетов сооружений. Формулируется требуемая форма окончательных результатов и
поясняется их физический смысл. Для получения этих данных можно использовать
любые методы, алгоритмы и программы статического расчета упругих систем на ЭВМ,
как отмечается в п. 2.6 данных Рекомендаций. При выполнении этих расчетов
ставится две задачи:
1. По принятой
статической модели сформировать матрицу жесткости [r] или податливости
(перемещений) ![]() ,
определяя компоненты этих матриц как реакции или перемещения (углы поворотов) в
точках сосредоточения масс динамической модели.
,
определяя компоненты этих матриц как реакции или перемещения (углы поворотов) в
точках сосредоточения масс динамической модели.
2. Для элементов
конструкций, прочность которых проверяется на статическое воздействие,
определить напряженно-деформированное состояние от единичных воздействий.
В зависимости от
применяемого метода расчета единичными воздействиями могут быть либо единичные
силы и моменты, либо единичные перемещения и углы вращения.
В п. 2.7 расчета
приведены необходимые сведения для статического расчета по методу сил, когда
внешним воздействием являются единичные силы ![]() и
и ![]() или единичные моменты
или единичные моменты ![]() и
и ![]() , где i
= 1, 2, 3; k = I, II, III, ..., n и
, где i
= 1, 2, 3; k = I, II, III, ..., n и ![]() - номера тел рассматриваемой динамической модели
сооружения. Полный вектор этой единичной нагрузки записывается в виде (4).
Причем, все единичные силы P... = 1 прикладываются последовательно к центрам
масс тел (несущих и подвешенных) по направлению осей, связанных с основанием
сооружения,
- номера тел рассматриваемой динамической модели
сооружения. Полный вектор этой единичной нагрузки записывается в виде (4).
Причем, все единичные силы P... = 1 прикладываются последовательно к центрам
масс тел (несущих и подвешенных) по направлению осей, связанных с основанием
сооружения, ![]() , а все
единичные моменты M... = 1 последовательно прикладываются относительно главных
и центральных осей инерции масс несущих и подвешенных тел
, а все
единичные моменты M... = 1 последовательно прикладываются относительно главных
и центральных осей инерции масс несущих и подвешенных тел ![]() и
и ![]() .
.
Последовательно, от
действия каждой единичной силы (или момента), как от внешней нагрузки,
выполняется расчет статической модели сооружения. Этот расчет может быть
выполнен с привлечением любых имеющихся в распоряжении проектировщика программ,
вычислительных комплексов и т.д. В результате этого расчета отдельно от каждой
из единичных сил и моментов (компонент векторов (4)) должны быть определены:
1.
Напряженно-деформированное состояние всех элементов, прочность которых
проверяется на сейсмическое воздействие. Результаты сводятся в таблицы типа
табл. 1. По этим результатам после определения сейсмических сил и моментов,
путем корректировки их на фактические величины сил и моментов, вычисляются
расчетные параметры напряженно-деформированного состояния конструкций. Каждое единичное
загружение силой или моментом определяет свое напряженное состояние
рассматриваемых элементов.
2. Вычисляются
перемещения всех точек статической модели сооружения, соответствующих центрам
масс динамической модели. Перемещения вычисляются по направлениям осей,
связанных с основанием сооружения, ![]() .
Вычисляются также величины углов поворотов (вращений) тел динамической модели
относительно главных центральных осей инерции масс этих тел. Фактически
определяются углы поворота осей, введенных в статическую модель. Поскольку эти
оси неизменно связаны с массами динамической модели, то углы поворота осей
статической модели соответствуют углам вращения масс динамической модели. От
каждого отдельного единичного загружения компонентами вектора (4) вычисляются
указанные перемещения и углы поворота, которые определяют компоненты вектора
(5). Каждый отдельный вектор (5) от соответствующего
единичного загружения определяет столбец матрицы податливости системы
.
Вычисляются также величины углов поворотов (вращений) тел динамической модели
относительно главных центральных осей инерции масс этих тел. Фактически
определяются углы поворота осей, введенных в статическую модель. Поскольку эти
оси неизменно связаны с массами динамической модели, то углы поворота осей
статической модели соответствуют углам вращения масс динамической модели. От
каждого отдельного единичного загружения компонентами вектора (4) вычисляются
указанные перемещения и углы поворота, которые определяют компоненты вектора
(5). Каждый отдельный вектор (5) от соответствующего
единичного загружения определяет столбец матрицы податливости системы ![]() , и
полная совокупность этих столбцов определяет всю матрицу
, и
полная совокупность этих столбцов определяет всю матрицу ![]() ,
которая с учетом введенной в п. 2.6 нумерации элементов имеет следующий вид:
,
которая с учетом введенной в п. 2.6 нумерации элементов имеет следующий вид:
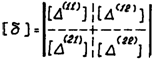
где подблоки ![]() (s, t = 1, 2, 3) определяются следующим
образом:
(s, t = 1, 2, 3) определяются следующим
образом:
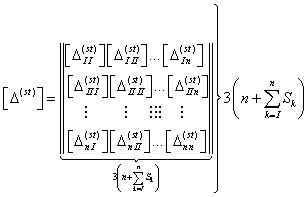 ; (69)
; (69) ; (70)
; (70) ; (71)
; (71) ; (72)
; (72)Здесь ![]() - компоненты вектора
- компоненты вектора ![]() (5). Каждый из векторов (5) является
соответствующим столбцом матрицы податливости
(5). Каждый из векторов (5) является
соответствующим столбцом матрицы податливости ![]() (59) - (73). Столбцы располагаются в матрице
(59) - (73). Столбцы располагаются в матрице ![]() в последовательности компонент вектора
единичной нагрузки
в последовательности компонент вектора
единичной нагрузки ![]() (4). Число столбцов
(4). Число столбцов ![]() определяется числом компонент вектора (4), а
число строк
определяется числом компонент вектора (4), а
число строк ![]() равно числу компонент вектора (5). Структура
матрицы
равно числу компонент вектора (5). Структура
матрицы ![]() отображена в табл. 2. Задача по формированию
(59) - (73) сводится к заполнению этой таблицы.
отображена в табл. 2. Задача по формированию
(59) - (73) сводится к заполнению этой таблицы.
В п. 2.7 векторы
единичной нагрузки (4) и перемещений (5), а также структура матриц (59) - (73)
записаны для случая, когда каждая из ![]() масс расчетной модели представлена в виде
твердого тела с шестью степенями свободы. Количество степеней свободы равно
масс расчетной модели представлена в виде
твердого тела с шестью степенями свободы. Количество степеней свободы равно ![]() и оно определяет:
и оно определяет:
- число единичных загружений для статической модели;
- число
напряженно-деформированных состояний для всех элементов, прочность которых
проверяется на сейсмическое воздействие (см. табл. 1);
- число столбцов
(число компонент вектора единичной нагрузки (4)) и число строк (число компонент
вектора единичных перемещений (5)) матрицы податливости (59) - (73) (см. табл.
2).
Если в расчетной
динамической модели часть масс представлена материальными точками, а другая
часть - твердыми дисками и телами, то число степеней свободы такой модели равно
- ![]() , где
, где ![]() - число степеней свободы m-ой массы;
- число степеней свободы m-ой массы; ![]() - число масс системы. В этом случае число
степеней свободы всей системы определяет указанные выше характеристики. В
частности, если какая-то масса имеет меньше шести степеней свободы и
представлена материальной точкой или диском, то из (4) и (5) следует удалить
компоненты, соответствующие отсутствующим степеням свободы, исключив при этом
из матрицы
- число масс системы. В этом случае число
степеней свободы всей системы определяет указанные выше характеристики. В
частности, если какая-то масса имеет меньше шести степеней свободы и
представлена материальной точкой или диском, то из (4) и (5) следует удалить
компоненты, соответствующие отсутствующим степеням свободы, исключив при этом
из матрицы ![]() (59) соответствующие строки и столбцы.
Структура векторов (4) и (5) и матрицы (59) в целом при этом сохраняется.
(59) соответствующие строки и столбцы.
Структура векторов (4) и (5) и матрицы (59) в целом при этом сохраняется.
Принятая блочная
структура матрицы податливости ![]() (59) - (73) соответствует решению двух задач.
(59) - (73) соответствует решению двух задач.
1. Подвешенные
массы отсутствуют (![]() , k =
I, II, III, ..., n), матрица податливости упругогравитационной системы
, k =
I, II, III, ..., n), матрица податливости упругогравитационной системы ![]() (59) - (73) переходит в аналогичную матрицу
для упругой системы (РДМ сооружений обычного типа без подвешенных масс).
Структура и анализ такой матрицы
(59) - (73) переходит в аналогичную матрицу
для упругой системы (РДМ сооружений обычного типа без подвешенных масс).
Структура и анализ такой матрицы ![]() рассмотрены в ряде работ [11, 13].
рассмотрены в ряде работ [11, 13].
В другом случае,
когда между массами, подвешенными к различным несущим телам, нет
упругих связей и их движение происходит автономно, подблоки (71) и (72)
принимают вид:
 ; (74)
; (74)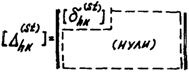 . (75)
. (75)
Если еще и между
несущими и подвешенными телами отсутствуют связи, то подблоки (70) с учетом
(74) и (75) принимают вид:
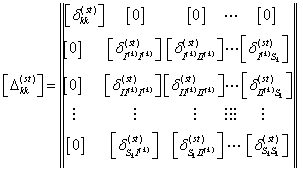 . (76)
. (76)В этом случае
полная матрица податливости всей системы распадается на 1 + P обособленных
составляющих, где P <= n - число автономно подвешенных систем масс. Порядок
первой обособленной составляющей в общем случае равен 6n, а порядок каждой из
числа P обособленных составляющих равен ![]() .
Суммарный порядок этих обособленных составляющих остается прежним -
.
Суммарный порядок этих обособленных составляющих остается прежним - ![]() , но
задачу дальнейшего расчета каждой из этих обособленных составляющих следует
решать раздельно, потому что каждая из них описывает самостоятельную и
независимую группу колебаний. Следует иметь ввиду, что
каждая из указанных обособленных составляющих, в свою очередь, может
распадаться на другие обособленные составляющие.
, но
задачу дальнейшего расчета каждой из этих обособленных составляющих следует
решать раздельно, потому что каждая из них описывает самостоятельную и
независимую группу колебаний. Следует иметь ввиду, что
каждая из указанных обособленных составляющих, в свою очередь, может
распадаться на другие обособленные составляющие.
Требования по
анализу полной матрицы ![]() для выделения обособленных составляющих
сформулированы в п. 2.11 настоящих Рекомендаций.
для выделения обособленных составляющих
сформулированы в п. 2.11 настоящих Рекомендаций.
2. Принятая блочная
структура матрицы податливости всей системы ![]() (68) - (73) подчеркивает пространственный
характер движения масс сооружения при расчете на сейсмические воздействия. Блок
(68) - (73) подчеркивает пространственный
характер движения масс сооружения при расчете на сейсмические воздействия. Блок
![]() (68) соответствует описанию поступательного
движения точечных масс или центров масс дисков и тел. Блок
(68) соответствует описанию поступательного
движения точечных масс или центров масс дисков и тел. Блок ![]() соответствует описанию вращения дисков или тел
относительно своих центров масс. Блок второстепенной диагонали
соответствует описанию вращения дисков или тел
относительно своих центров масс. Блок второстепенной диагонали ![]() (штрих - знак транспонирования) соответствует
описанию взаимосвязи поступательного движения и вращения. Если блоки
второстепенной диагонали являются нулевыми матрицами, то поступательные и
вращательные движения масс не взаимосвязаны и происходят самостоятельно,
поскольку матрицы
(штрих - знак транспонирования) соответствует
описанию взаимосвязи поступательного движения и вращения. Если блоки
второстепенной диагонали являются нулевыми матрицами, то поступательные и
вращательные движения масс не взаимосвязаны и происходят самостоятельно,
поскольку матрицы ![]() и
и ![]() являются обособленными составляющими полной
матрицы
являются обособленными составляющими полной
матрицы ![]() (68).
(68).
Таким образом,
деформационная структура сооружения (его статической и динамической модели)
определяет через матрицу (68) - (76) тот или иной пространственный характер
движения масс. В режиме вынужденных колебаний эти движения усложняются за счет
пространственного характера сейсмического воздействия.
Положения по расчету
методом деформаций сформулированы в п. 2.8 настоящих Рекомендаций. В данном
случае определяются соответствующие жесткости. Для этой цели в статической
модели сооружения в точках, соответствующих центрам масс, накладываются три ортогональные связи, препятствующие линейным
перемещениям в трех ортогональных направлениях осей, связанных с основанием, ![]() .
Накладываются также связи, препятствующие углам поворотов относительно главных
и центральных осей инерции. Последовательно каждой из наложенных связей
сообщается единичное перемещение
.
Накладываются также связи, препятствующие углам поворотов относительно главных
и центральных осей инерции. Последовательно каждой из наложенных связей
сообщается единичное перемещение ![]() или единичный угол поворота
или единичный угол поворота ![]() ,
которые являются компонентами вектора (6), и при этом определяются:
,
которые являются компонентами вектора (6), и при этом определяются:
-
напряженно-деформированное состояние всех элементов, прочность которых
проверяется на сейсмическое воздействие; результаты этого расчета сводятся в
таблицы типа табл. 3. По ним после определения сейсмических перемещений и углов
вращения масс путем корректировки на фактические величины вычисляются
действительные расчетные параметры напряженно-деформированного состояния,
каждая компонента вектора (6) (единичные перемещения или углы поворота)
определяет свое напряженно-деформированное состояние рассматриваемых элементов;
- в форме вектора
(7) вычисляются реакции всех наложенных на систему связей, каждый вектор этих
реакций (сил и моментов) является столбцом матрицы жесткости рассматриваемой
динамической модели [r], которая заполняется в виде табл. 4, а структура этой
матрицы аналогична структуре матрицы ![]() (68) - (73):
(68) - (73):
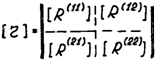 . (77)
. (77)Блоки ![]() (s, t = 1,2) определяются следующим образом:
(s, t = 1,2) определяются следующим образом:
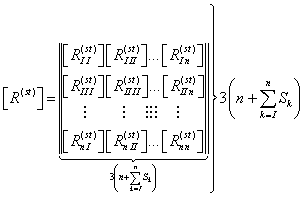 ; (78)
; (78)
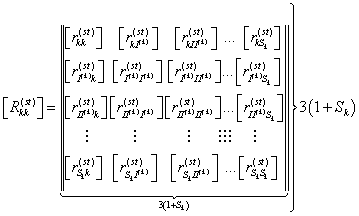 ; (79)
; (79)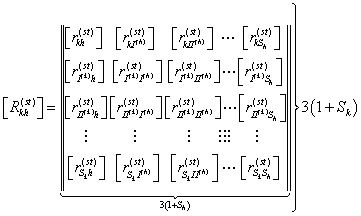 ; (80)
; (80)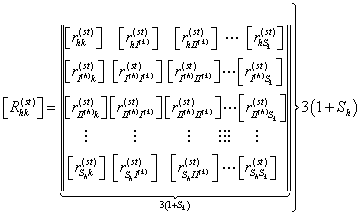 ; (81)
; (81)Реакции ![]() являются компонентами вектора (7), каждый из
которых представляет собой столбец матрицы жесткости [r] (77). Эти столбцы
располагаются в матрице [r] в порядке компонент вектора единичных перемещений и
углов поворота (6). Таким образом, число строк в матрице [r] равно числу
компонент вектора реакций (7), а число столбцов - числу компонент вектора
являются компонентами вектора (7), каждый из
которых представляет собой столбец матрицы жесткости [r] (77). Эти столбцы
располагаются в матрице [r] в порядке компонент вектора единичных перемещений и
углов поворота (6). Таким образом, число строк в матрице [r] равно числу
компонент вектора реакций (7), а число столбцов - числу компонент вектора ![]() (6).
(6).
В Рекомендациях
векторы (6) и (7) и матрица жесткости (77) - (82) записаны для случая, когда
каждая из ![]() масс динамической модели представлена твердыми
телами. Общее количество степеней свободы равно
масс динамической модели представлена твердыми
телами. Общее количество степеней свободы равно ![]() , и
оно, так же как и при решении задачи методом сил по
формированию матрицы податливости системы (68), определяет:
, и
оно, так же как и при решении задачи методом сил по
формированию матрицы податливости системы (68), определяет:
- число
накладываемых на систему связей и число единичных перемещений и углов поворота
(компоненты вектора (6));
- число
напряженно-деформированных состояний для всех элементов, прочность которых
проверяется на сейсмическое воздействие;
- число строк
(компоненты вектора реакций (7)) и число столбцов (компоненты вектора
перемещений и углов поворота (6)) матрицы жесткости системы (77) - (82) (см.
табл. 4).
В случаях, когда в
расчетной динамической модели часть масс представлена материальными точками, а
другая часть - твердыми дисками и телами, число степеней свободы равно ![]() , где
, где ![]() - число степеней свободы m-ой массы;
- число степеней свободы m-ой массы; ![]() - общее число масс системы. Это число степеней
свободы определяет перечисленные характеристики. При этом,
если число степеней свободы какого-либо тела принято меньше шести, то из
векторов (6) и (7) следует удалить компоненты, соответствующие отсутствующим
степеням свободы, исключив также из матрицы жесткости соответствующие строки и
столбцы. В целом структура векторов (6) и (7) и матрицы (77) - (82) при этом
сохраняется.
- общее число масс системы. Это число степеней
свободы определяет перечисленные характеристики. При этом,
если число степеней свободы какого-либо тела принято меньше шести, то из
векторов (6) и (7) следует удалить компоненты, соответствующие отсутствующим
степеням свободы, исключив также из матрицы жесткости соответствующие строки и
столбцы. В целом структура векторов (6) и (7) и матрицы (77) - (82) при этом
сохраняется.
Принятая блочная
структура матрицы жесткости системы [r] (77) - (82) удобна при анализе
следующих основных свойств системы.
1. Если отсутствуют
подвешенные тела, то матрица жесткости упругогравитационных систем (77) - (82)
переходит в аналогичную матрицу для упругой системы, структура и анализ которой
даны в [7, 11, 13].
Когда между
массами, подвешенными к различным несущим телам, нет упругих
связей и их движение происходит самостоятельно, то подблоки (80) и (81)
аналогичны по своей структуре (74) и (75)
 ; (83)
; (83) . (84)
. (84)
Если между
несущим и подвешенными телами отсутствуют связи, то при (83) и (84) структура
подблока (79) становится аналогичной (76)
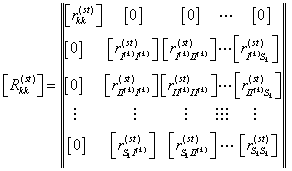 . (85)
. (85)
В последнем случае
полная матрица жесткости всей системы распадается на 1 + P обособленных
составляющих, где P - число автономно подвешенных систем тел. Каждая из этих
обособленных составляющих представляет обратную матрицу соответствующей
обособленной составляющей матрицы податливости ![]() (63). В общем случае порядок первой
обособленной составляющей равен 6n, а порядок каждой из числа P обособленных
составляющих равен
(63). В общем случае порядок первой
обособленной составляющей равен 6n, а порядок каждой из числа P обособленных
составляющих равен ![]() , где
, где ![]() - число подвешенных масс к k-му телу.
Суммарный порядок всех этих обособленных составляющих сохраняется и равен
- число подвешенных масс к k-му телу.
Суммарный порядок всех этих обособленных составляющих сохраняется и равен ![]() .
Каждая из обособленных составляющих описывает свою самостоятельную группу
движений, расчет которой следует выполнять отдельно.
.
Каждая из обособленных составляющих описывает свою самостоятельную группу
движений, расчет которой следует выполнять отдельно.
Требования по
анализу обособленности матриц жесткости отдельно сформулированы в п. 2.11
Рекомендаций.
2. В блочной форме
матрица жесткости [r] (77), так же как и в ![]() (68), подчеркивает пространственный характер
движений тел сооружения. Блок
(68), подчеркивает пространственный характер
движений тел сооружения. Блок ![]() (77) соответствует описанию поступательного
движения точечных масс и центров масс дисков и тел. Блок
(77) соответствует описанию поступательного
движения точечных масс и центров масс дисков и тел. Блок ![]() соответствует описанию вращения дисков или тел
относительно своих центров масс. Блоки второстепенной диагонали
соответствует описанию вращения дисков или тел
относительно своих центров масс. Блоки второстепенной диагонали ![]() (штрих - знак транспонирования) соответствуют
взаимосвязи поступательного движения и вращения. Если блоки второстепенной
диагонали являются нулевыми матрицами, то поступательные и вращательные
движения происходят самостоятельно, поскольку матрицы
(штрих - знак транспонирования) соответствуют
взаимосвязи поступательного движения и вращения. Если блоки второстепенной
диагонали являются нулевыми матрицами, то поступательные и вращательные
движения происходят самостоятельно, поскольку матрицы ![]() и
и ![]() являются обособленными составляющими (77) и
для них выполняются соотношения
являются обособленными составляющими (77) и
для них выполняются соотношения
![]() и
и ![]() , (86)
, (86)
где -1 - знак
обращения матрицы;
![]() и
и ![]() - соответствующие блоки матрицы податливости
- соответствующие блоки матрицы податливости ![]() (68).
(68).
Расчет
режима свободных колебаний
упругогравитационных
систем
Расчет свободных
колебаний сооружений с подвешенными массами как упругогравитационных систем
рассмотрен в пп. 2.9 и 2.16 настоящих Рекомендаций.
В соответствии с
требованиями п. 2.9 формируется диагональная матрица инерционных параметров
рассматриваемой динамической системы [M] размерностью, в общем случае, ![]() . Все
элементы этой матрицы, кроме главной диагонали, равны нулю. Главная диагональ в
виде вектора
. Все
элементы этой матрицы, кроме главной диагонали, равны нулю. Главная диагональ в
виде вектора ![]() записывается в форме (8). Компонентами этого
вектора являются массы и осевые моменты инерции дисков или тел, величины
которых определяются в соответствии с требованиями п. 2.3. В виде (8) приведена
главная диагональ матрицы [M] для общего случая, когда каждая масса
представлена в динамической модели твердым телом с шестью степенями свободы.
Если в динамической модели какая-то масса представлена материальной точкой или
твердым диском, то из диагонали (8) должны быть удалены инерционные параметры,
соответствующие исключенным степеням свободы.
записывается в форме (8). Компонентами этого
вектора являются массы и осевые моменты инерции дисков или тел, величины
которых определяются в соответствии с требованиями п. 2.3. В виде (8) приведена
главная диагональ матрицы [M] для общего случая, когда каждая масса
представлена в динамической модели твердым телом с шестью степенями свободы.
Если в динамической модели какая-то масса представлена материальной точкой или
твердым диском, то из диагонали (8) должны быть удалены инерционные параметры,
соответствующие исключенным степеням свободы.
Специфика
упругогравитационных динамических систем состоит в том, что движение масс при
внешнем воздействии происходит под действием упругих сил и сил тяжести
(гравитационных восстанавливающих сил). Структура гравитационных
восстанавливающих сил определяется матрицей гравитационных добавок [H], которая
формируется в соответствии с требованиями п. 2.10 настоящих Рекомендаций.
Порядок матрицы [H] обязательно должен совпадать с порядком матрицы жесткости
[r] (77).
В п. 2.10 поэтапно
вычисляются компоненты матрицы [H].
Согласно п. 2.10 по
формуле (9) вычисляются частоты парциальных колебаний всех подвешенных масс.
Перед этими вычислениями определяется условная точка подвеса P-ой массы к k-му
несущему телу. Определение такой точки дано в п. 2.10. В соответствии с этим
определением в качестве условной точки подвеса следует принимать вертикальную
проекцию центра масс подвешенного ![]() -го
тела на нижнюю поверхность k-го тела, к которой крепятся несущие подвески.
После выделения условной точки подвеса определяются два вектора
-го
тела на нижнюю поверхность k-го тела, к которой крепятся несущие подвески.
После выделения условной точки подвеса определяются два вектора ![]() и
и ![]() .
.
Компоненты ![]() определяют координаты условной точки подвеса в
осях несущего k-го тела
определяют координаты условной точки подвеса в
осях несущего k-го тела ![]() , т.е.
, т.е. ![]() - расстояние по оси
- расстояние по оси ![]() между точкой k и условной точкой подвеса.
Компоненты
между точкой k и условной точкой подвеса.
Компоненты ![]() определяются как расстояния между условной
точкой подвеса и центром масс
определяются как расстояния между условной
точкой подвеса и центром масс ![]() -го
подвешенного тела в инерциальных осях
-го
подвешенного тела в инерциальных осях ![]() , т.е.
, т.е. ![]() - расстояние между условной точкой подвеса и
точкой
- расстояние между условной точкой подвеса и
точкой ![]() по оси
по оси ![]() . Эти
расстояния могут быть определены непосредственно по расчетной динамической
модели или могут вычисляться по формуле
. Эти
расстояния могут быть определены непосредственно по расчетной динамической
модели или могут вычисляться по формуле
![]() , (87)
, (87)
где ![]() и
и ![]() - матрицы (1) и (2), введенные в п. 2.5,
пояснения к которым даны в (60) - (65);
- матрицы (1) и (2), введенные в п. 2.5,
пояснения к которым даны в (60) - (65);
' (штрих) - знак
транспонирования.
Компонента ![]() определяет условную длину подвески
определяет условную длину подвески ![]() -ой
массы, по величине которой в п. 2.10 согласно (9) вычисляется частота
парциальных колебаний рассматриваемой подвешенной массы.
-ой
массы, по величине которой в п. 2.10 согласно (9) вычисляется частота
парциальных колебаний рассматриваемой подвешенной массы.
По компонентам ![]() ,
согласно п. 2.10 по формулам (11), вычисляются матрицы констант
,
согласно п. 2.10 по формулам (11), вычисляются матрицы констант ![]() ,
характеризующих специфику подвешивания
,
характеризующих специфику подвешивания ![]() -ой
массы. В частности, если масса подвешена таким образом, что центры масс
расположены на одной вертикали, то эта матрица имеет вид:
-ой
массы. В частности, если масса подвешена таким образом, что центры масс
расположены на одной вертикали, то эта матрица имеет вид:
 . (88)
. (88)
Согласно п. 2.10 из
компонент ![]() формируются кососимметричные матрицы
формируются кососимметричные матрицы ![]() в виде (15) и вычисляются составляющие
в виде (15) и вычисляются составляющие ![]() и
и ![]() полной матрицы гравитационных добавок [H] в
виде (13) и (14).
полной матрицы гравитационных добавок [H] в
виде (13) и (14).
Из составляющих ![]() и
и ![]() в соответствии с п. 2.11 формируется матрица
[H] в виде табл. 5. Структура этой матрицы имеет следующий вид:
в соответствии с п. 2.11 формируется матрица
[H] в виде табл. 5. Структура этой матрицы имеет следующий вид:
 . (89)
. (89)Блоки ![]() (s, t = 1, 2) имеют вид:
(s, t = 1, 2) имеют вид:
 .
.
Блоки ![]() и
и ![]() являются нулевыми матрицами. Для блоков
являются нулевыми матрицами. Для блоков ![]() и
и ![]() подблоки
подблоки ![]() (при
(при ![]() ), а
подблоки
), а
подблоки ![]() определяются в виде:
определяются в виде:
 . (90)
. (90)
С учетом (13) составляющие
![]() имеют вид:
имеют вид:
 ;
;
 ;
;
 ;
;
 ;
;
![]() при
при ![]() . (91)
. (91)
На основании (14)
составляющие ![]() записываются в виде:
записываются в виде:
 ;
;
 ;
;
![]() .
.
Структура матрицы
[H] (89) - (92) отображена также в табл. 5.
Согласно п. 2.11
выполняется анализ полной матрицы жесткости [r] или податливости ![]() для выявления обособленных составляющих,
описывающих самостоятельные группы пространственных колебаний. Пространственный
характер движения масс сооружения зависит от его деформационных свойств,
которые отображаются в матрицах податливости
для выявления обособленных составляющих,
описывающих самостоятельные группы пространственных колебаний. Пространственный
характер движения масс сооружения зависит от его деформационных свойств,
которые отображаются в матрицах податливости ![]() (68) - (73) или жесткости [r] (77) - (82).
Соотношения
(68) - (73) или жесткости [r] (77) - (82).
Соотношения ![]() удовлетворяются для матриц, которые не
содержат обособленных составляющих. Определение обособленных составляющих
матриц дано в специальной литературе. Анализ распадения матриц податливости
удовлетворяются для матриц, которые не
содержат обособленных составляющих. Определение обособленных составляющих
матриц дано в специальной литературе. Анализ распадения матриц податливости ![]() или жесткости [r] на обособленные составляющие
для упругих систем применительно к сооружениям без подвешенных масс дан в [11],
где показано, что с физической точки зрения распадения [r] или
или жесткости [r] на обособленные составляющие
для упругих систем применительно к сооружениям без подвешенных масс дан в [11],
где показано, что с физической точки зрения распадения [r] или ![]() на обособленные составляющие определяются
свойствами асимметрии такого типа систем. На характер распадения [r] или
на обособленные составляющие определяются
свойствами асимметрии такого типа систем. На характер распадения [r] или ![]() на обособленные составляющие влияет вид
асимметрии (полная асимметрия, абсолютная симметрия, тип частичной асимметрии)
и ее однородность. Для полностью асимметричной системы матрица [r] или
на обособленные составляющие влияет вид
асимметрии (полная асимметрия, абсолютная симметрия, тип частичной асимметрии)
и ее однородность. Для полностью асимметричной системы матрица [r] или ![]() не распадается на обособленные составляющие, а
для абсолютно симметричных упругих систем эти матрицы распадаются, как
максимум, на шесть обособленных составляющих. Все остальные разновидности
распадения расположены в этом диапазоне. Значительно сложнее задача решается
для систем с подвешенными массами, поскольку упругие модели таких систем всегда
являются частично асимметричными. Кроме того, задача усложняется структурой
упругих связей, наложенных на системы подвешенных и несущих масс модели, как
было показано выше при описании свойств матриц
не распадается на обособленные составляющие, а
для абсолютно симметричных упругих систем эти матрицы распадаются, как
максимум, на шесть обособленных составляющих. Все остальные разновидности
распадения расположены в этом диапазоне. Значительно сложнее задача решается
для систем с подвешенными массами, поскольку упругие модели таких систем всегда
являются частично асимметричными. Кроме того, задача усложняется структурой
упругих связей, наложенных на системы подвешенных и несущих масс модели, как
было показано выше при описании свойств матриц ![]() или [r]. В любом случае существует формальный
прием анализа на обособленность составляющих, который состоит в том, что
строится система линейных алгебраических уравнений с коэффициентами в виде
компонент анализируемой матрицы. Если при этом одна какая-то группа уравнений
не зависит от другой группы уравнений, то коэффициенты этих групп образуют
соответствующие обособленные составляющие анализируемой матрицы. Путем
перегруппировки неизвестных (перестановка местами строк и столбцов
анализируемой матрицы) можно исходную матрицу [A] свести к квазидиагональному
виду:
или [r]. В любом случае существует формальный
прием анализа на обособленность составляющих, который состоит в том, что
строится система линейных алгебраических уравнений с коэффициентами в виде
компонент анализируемой матрицы. Если при этом одна какая-то группа уравнений
не зависит от другой группы уравнений, то коэффициенты этих групп образуют
соответствующие обособленные составляющие анализируемой матрицы. Путем
перегруппировки неизвестных (перестановка местами строк и столбцов
анализируемой матрицы) можно исходную матрицу [A] свести к квазидиагональному
виду:
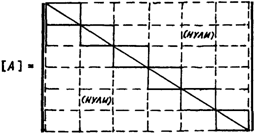 . (93)
. (93)
Каждая из этих
обособленных составляющих матрицы жесткости [r] или податливости ![]() описывает свою независимую группу деформаций и
соответствует самостоятельной группе колебаний.
описывает свою независимую группу деформаций и
соответствует самостоятельной группе колебаний.
Анализ матриц [r]
или ![]() является вспомогательным и дает только
представление о физической стороне задачи. Этот анализ является необходимым,
поскольку расчет режима свободных колебаний упругогравитационных систем
выполняется по матрице динамических коэффициентов, определяемых комбинацией
матриц жесткости [r], гравитационных добавок [H] и инерционных параметров [M] в
виде (18):
является вспомогательным и дает только
представление о физической стороне задачи. Этот анализ является необходимым,
поскольку расчет режима свободных колебаний упругогравитационных систем
выполняется по матрице динамических коэффициентов, определяемых комбинацией
матриц жесткости [r], гравитационных добавок [H] и инерционных параметров [M] в
виде (18):
![]() .
.
Поэтому в соответствии
с требованиями п. 2.13 выполняется вычисление матрицы динамических параметров
системы.
Согласно
требованиям п. 2.14 выполняется анализ по определению обособленных составляющих
матрицы динамических параметров [A]. Этот анализ аналогичен анализу матрицы [r]
или ![]() .
Анализ [A] дает достаточные условия решения задачи по определению собственных
значений и векторов матрицы [A]. Следует иметь в виду, что обособленные
составляющие матрицы динамических параметров [A] могут отличаться от
обособленных составляющих матриц [r] или
.
Анализ [A] дает достаточные условия решения задачи по определению собственных
значений и векторов матрицы [A]. Следует иметь в виду, что обособленные
составляющие матрицы динамических параметров [A] могут отличаться от
обособленных составляющих матриц [r] или ![]() .
.
Решение задачи на
собственные значения следует выполнять отдельно для каждой обособленной
составляющей ![]() или
или ![]() , как
это требуется в соответствии с п. 2.14. Решение такой задачи может быть
выполнено любыми известными методами, но как правило,
для сооружений порядок матриц
, как
это требуется в соответствии с п. 2.14. Решение такой задачи может быть
выполнено любыми известными методами, но как правило,
для сооружений порядок матриц ![]() или
или ![]() таков, что без привлечения ЭВМ эту задачу
решить невозможно. В настоящее время математическое обеспечение любой ЭВМ
содержит стандартные программы по определению собственных значений и векторов
матриц. Матрицы, с которыми обращаются к ЭВМ для решения задачи на собственные
значения, не должны содержать обособленных составляющих, в противном случае
задача теряет смысл, что будет приводить к аварийным остановкам ЭВМ. Смысл
задачи сводится к решению уравнений в прямой форме (21) или обратной форме
(22), которые записаны для случая полных матриц [A] и [B], не содержащих
обособленных составляющих. Для каждой обособленной составляющей
таков, что без привлечения ЭВМ эту задачу
решить невозможно. В настоящее время математическое обеспечение любой ЭВМ
содержит стандартные программы по определению собственных значений и векторов
матриц. Матрицы, с которыми обращаются к ЭВМ для решения задачи на собственные
значения, не должны содержать обособленных составляющих, в противном случае
задача теряет смысл, что будет приводить к аварийным остановкам ЭВМ. Смысл
задачи сводится к решению уравнений в прямой форме (21) или обратной форме
(22), которые записаны для случая полных матриц [A] и [B], не содержащих
обособленных составляющих. Для каждой обособленной составляющей ![]() или
или ![]() эти уравнения записываются аналогично. Порядок
уравнений определяется порядком матриц
эти уравнения записываются аналогично. Порядок
уравнений определяется порядком матриц ![]() или
или ![]() , в
соответствии с которыми определяются векторы собственных значений
(коэффициентов форм колебаний)
, в
соответствии с которыми определяются векторы собственных значений
(коэффициентов форм колебаний) ![]() . При
решении задачи предпочтительнее пользоваться прямой формой уравнений (21),
поскольку в обратной форме вычисляются собственные значения, обратные квадратам
частот
. При
решении задачи предпочтительнее пользоваться прямой формой уравнений (21),
поскольку в обратной форме вычисляются собственные значения, обратные квадратам
частот ![]() , в
результате чего накапливается погрешность счета на ЭВМ.
, в
результате чего накапливается погрешность счета на ЭВМ.
Каждая обособленная
составляющая ![]() или
или ![]() определяет свою самостоятельную группу
колебаний, для которой результаты решения по определению частот и форм
целесообразно сводить в таблицы типа табл. 6.
определяет свою самостоятельную группу
колебаний, для которой результаты решения по определению частот и форм
целесообразно сводить в таблицы типа табл. 6.
Найденные
коэффициенты форм колебаний ![]() определяют только соотношения между ними.
Поэтому целесообразно нормировать эти коэффициенты по отношению к какому-либо
одному из них, принимая его за единицу. В п. 2.15 в качестве такого
нормирующего множителя рекомендуется принимать значение коэффициента
перемещения I массы в направлении оси
определяют только соотношения между ними.
Поэтому целесообразно нормировать эти коэффициенты по отношению к какому-либо
одному из них, принимая его за единицу. В п. 2.15 в качестве такого
нормирующего множителя рекомендуется принимать значение коэффициента
перемещения I массы в направлении оси ![]() системы отсчета
системы отсчета ![]() , т.е.
, т.е.
![]() .
.
Критерием точности решения задачи расчета режима свободных колебаний
является проверка условий ортогональности найденных форм. Положения по этой
проверке сформулированы в п. 2.16. Проверка сводится к заполнению табл. 7 для
каждой самостоятельной группы колебаний.
Решение задачи по
расчету режима свободных колебаний представляет общую процедуру, единую для
динамических расчетов сооружений на любые возмущения (сейсмические, ветровые,
промышленные вибрации и т.д.). Поэтому, если отсутствуют специализированные
комплексы автоматизированных расчетов на ЭВМ, то вычислительную процедуру
расчета режима свободных колебаний целесообразно запрограммировать
самостоятельно и использовать ее в индивидуальной практике проектной
организации. Такую процедуру целесообразно строить по структуре, показанной на
рис. 1.
Расчетные
параметры сейсмического воздействия
Рассмотренные
пояснения алгоритма относятся к расчету сооружений на любые динамические воздействия.
Динамический расчет сооружения на конкретное воздействие начинается с
формулировки модели динамического возмущения и определения ее расчетных
параметров.
Рассматриваемые в
данных Рекомендациях методы динамического расчета сооружений учитывают пространственный
характер сейсмического воздействия, которое по своей природе представляет
фрагмент волнового поля движения грунта в основании сооружения при
землетрясении. Общепризнано [11], что поле сейсмических
движений грунта имеет три явно выраженные фазы (P, S и L), определяющиеся
соответственно продольными (безвихревыми) P-, поперечными (сдвиговыми или
вихревыми) S- и поверхностными (которые также являются вихревыми) L-волнами,
распространяющимися с определенными (имеющими свои закономерности изменения)
конечными величинами фазовых скоростей. В начале
наблюдается P-фаза, определенная продольными волнами, имеющими максимальную
фазовую скорость. В этой фазе поле сейсмических движений является безвихревым и движение грунта определяется только его
дилатацией (расширение-сжатие). Данная фаза характерна высокочастотными
движениями грунта с малыми амплитудами, поэтому она не приводит к разрушениям
сооружений. После P-фазы наступает S-фаза, определяемая
распространением поперечных волн, которые имеют фазовую скорость меньше, чем
P-волны. В S-фазе частотный состав ниже, а интенсивность движений
существенно больше, чем в P-фазе. Основные повреждения сооружений при
землетрясениях, по общепризнанному мнению [11], имеют место в S-фазе, которая определяет вихревое поле движений грунта. В вихревом
поле движение грунта определяется его ротацией (искажение объема массива
грунта). Поверхностные L-волны (Лэмба-Рэлея, Лява), грубо говоря, представляют
некоторую модификацию S-волны с фазовой скоростью, зависящей от свойств структуры среды распространения волн. Фазовая скорость
L-волны, как правило, еще меньше, чем S-волн. В L-фазе поля движений грунта
носят общий характер и определяются как дилатацией, так и ротацией массива
грунта. Для L-фазы характерен более низкий частотный состав и более слабая
интенсивность движения грунта, чем в S-фазе. Повреждения сооружений, начатые в
S-фазе при землетрясениях, продолжают развиваться в L-фазе. Таким образом,
основные повреждения и разрушения сооружений при землетрясениях определяются возмущениями
в виде фрагментов вихревого поля в S-фазе и поля общего характера в L-фазе. Эти
фрагменты поля определены дилатацией и ротацией массива грунтового основания,
результатом которых являются соответствующие векторы ускорений поступательного
движения, углового ускорения и углов вращения.
Векторы
сейсмического воздействия характеризуются: интенсивностью, спектральным
составом и ориентацией в пространстве. Эти характеристики определяют расчетные
параметры, вычисление которых сформулировано в пяти пунктах: п. 2.17 определяет
интенсивность ускорения поступательного движения; п. 2.18 - интенсивность
углового ускорения вращения; п. 2.19 - интенсивность углов вращения; п. 2.20 -
спектральный состав этих векторов; п. 2.21 - ориентацию векторов сейсмического воздействия.
Как отмечалось,
сейсмическое воздействие представляет поле движений грунта, в каждом
элементарном объеме которого определены векторы ускорения поступательного
движения, углового ускорения и углов вращения. На сооружение воздействует не
все поле, а только его фрагмент, представляющий массив грунта в основании
сооружения. Следовательно, в качестве расчетной величины воздействия на
сооружение должна приниматься осредненная в пределах этого фрагмента
интенсивность движений грунта.
В п. 2.17 сформулированы
требования по определению осредненной интенсивности вектора
ускорения поступательного движения грунта при сейсмическом воздействии.
Под интенсивностью любого вектора понимается всегда положительная величина,
равная его модулю, которая инвариантна по отношению к ориентации в пространстве
осей отсчета для определения этой величины. Такая расчетная инвариантная
интенсивность определяется как модуль вектора по его компонентам
 , (94)
, (94)где ![]() (i = 1, 2, 3) - компоненты, а
(i = 1, 2, 3) - компоненты, а ![]() - модуль вектора ускорения поступательного
движения сейсмического воздействия.
- модуль вектора ускорения поступательного
движения сейсмического воздействия.
Параметры
интенсивности компонент вектора ![]() определяются осреднением по соответствующей
площади как поток поля ускорений через эту площадь:
определяются осреднением по соответствующей
площади как поток поля ускорений через эту площадь:
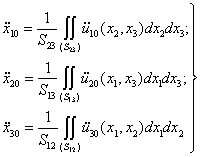 , (95)
, (95)где ![]() - ускорения поля движений грунта в направлении
осей координат
- ускорения поля движений грунта в направлении
осей координат ![]() (i = 1, 2, 3);
(i = 1, 2, 3);
![]() - площади в ортогональных направлениях, через
которые вычисляются потоки фрагмента рассматриваемого поля.
- площади в ортогональных направлениях, через
которые вычисляются потоки фрагмента рассматриваемого поля.
Площади ![]() в (95) образуют объем фрагмента
рассматриваемого поля. Поэтому инвариант интенсивности ускорения
поступательного движения грунта I по (94) является функцией от этого объема Q.
Такая функция является положительной и убывающей по мере увеличения Q.
Результаты обработки записей землетрясений и решения задач по оценке свойств полей
сейсмического движения грунта [6, 9, 11] показывают, что эту зависимость можно
аппроксимировать экспонентой вида:
в (95) образуют объем фрагмента
рассматриваемого поля. Поэтому инвариант интенсивности ускорения
поступательного движения грунта I по (94) является функцией от этого объема Q.
Такая функция является положительной и убывающей по мере увеличения Q.
Результаты обработки записей землетрясений и решения задач по оценке свойств полей
сейсмического движения грунта [6, 9, 11] показывают, что эту зависимость можно
аппроксимировать экспонентой вида:
где ![]() - ускорение силы тяжести;
- ускорение силы тяжести;
A (-) и k ![]() - аппроксимирующие коэффициенты;
- аппроксимирующие коэффициенты;
Q (м3) -
учитываемый в расчете объем фрагмента рассматриваемого поля сейсмических
движений грунта.
Максимальная
величина расчетного значения инварианта интенсивности
ускорения поступательного движения грунта при сейсмическом воздействии
имеет место в точке, когда Q = 0 и I(0) = A.
Самостоятельную
проблему представляет задача по определению объема Q (96), в пределах которого
вычисляется поток поля ускорений сейсмического движения грунта. Этот объем
фундамента с прилегающим к нему массивом грунта, определение которого
представляет большую сложность и выполняется в рамках контактной динамической
задачи. В первом приближении можно ограничиться хотя бы вычислением потока
через объем массива фундамента сооружения, но, учитывая, что решение такой
задачи было бы сложным для проектировщиков, целесообразно свести
аппроксимирующую функцию (96) к аналогичной экспоненциальной зависимости от
меньшего размера сооружения в плане B, представив ее в виде (27) и (28).
Интенсивности
векторов углового ускорения и углов поворота вращательных движений грунта в
основании сооружения определяются в соответствии с требованиями пп. 2.18 и
2.19. Инварианты интенсивности этих векторов определяются как их модули
 ; (97)
; (97) , (98)
, (98)где ![]() и
и ![]() (i = 1, 2, 3) - компоненты, а
(i = 1, 2, 3) - компоненты, а ![]() и
и ![]() - модули векторов углов поворота и углового
ускорения вращения основания сооружения.
- модули векторов углов поворота и углового
ускорения вращения основания сооружения.
Компоненты векторов
углов поворота и углового ускорения вращения сейсмического воздействия
определяются по теореме Стокса, как циркуляции поля перемещений и ускорений
поступательного движения по соответствующим замкнутым контурам (L). Такие
циркуляции равны потокам ротации и ускорения ротации этого же поля через
поверхности (S), ограниченные контурами (L) [1, 2]:
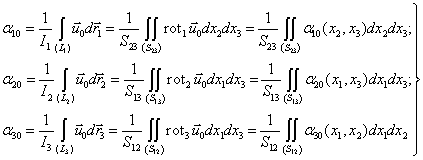 ; (99)
; (99)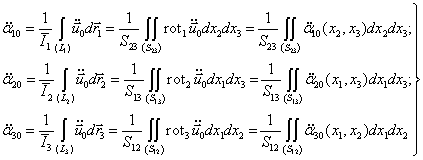 ,
(100)
,
(100)где ![]() и
и ![]() - элементарные циркуляции поля перемещений
- элементарные циркуляции поля перемещений ![]() и ускорений
и ускорений ![]() сейсмического движения грунта по приращению радиуса-вектора
сейсмического движения грунта по приращению радиуса-вектора ![]() вдоль замкнутого контура
вдоль замкнутого контура ![]() (i = 1, 2, 3);
(i = 1, 2, 3);
![]() и
и ![]() - мощности (интенсивности) вихревого поля
перемещений и ускорений по замкнутому контуру
- мощности (интенсивности) вихревого поля
перемещений и ускорений по замкнутому контуру ![]() .
.
Поле ротации ![]() и его ускорение
и его ускорение ![]() определяются по данным поля перемещений
определяются по данным поля перемещений ![]() и ускорений
и ускорений ![]() с помощью векторного оператора ротации [1, 2]:
с помощью векторного оператора ротации [1, 2]:
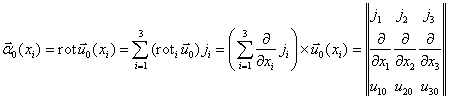 ;
(101)
;
(101) ,
(102)
,
(102)где ![]() - орты осей
- орты осей ![]() ;
;
![]() - знак векторного произведения.
- знак векторного произведения.
Развернув (101) и
(102), получим следующие выражения компонент поля ротации и его ускорения:
 ;
(103)
;
(103) .
(104)
.
(104)Компоненты ![]() и
и ![]() определяются волновыми функциями
соответствующих сейсмических волн. Поэтому вид этих функций и их параметры
зависят от типа грунтов, в которых распространяются волны.
определяются волновыми функциями
соответствующих сейсмических волн. Поэтому вид этих функций и их параметры
зависят от типа грунтов, в которых распространяются волны.
После
осреднения в (99), (100) компонент ротации (103) и их ускорений (104) по
площадям ![]() ,
определяющим некоторый объем Q, получим, что инварианты интенсивности углов
(97) и угловых ускорений (98) вращения сейсмического воздействия представляют в
общем виде функции от объема осреднения Q, типа грунтов и инварианта
интенсивности ускорения поступательного движения I (94) - (96), (27), т.е.
,
определяющим некоторый объем Q, получим, что инварианты интенсивности углов
(97) и угловых ускорений (98) вращения сейсмического воздействия представляют в
общем виде функции от объема осреднения Q, типа грунтов и инварианта
интенсивности ускорения поступательного движения I (94) - (96), (27), т.е.
Явный вид функций
(105) и (106) и их параметры устанавливаются при исследованиях. Обычно это
функции, убывающие по мере увеличения Q, возрастающие по мере роста I.
Нормировать такие функции по всей совокупности их аргументов сложно. Поэтому в
пп. 2.18 и 2.19 вводятся функции (20) - (32), нормированные (безотносительные)
на величину I, которые определяют инварианты интенсивности углового ускорения и
углов вращения сейсмического воздействия как независимые величины от I
![]() (Q, тип грунта)
(Q, тип грунта) ![]() .
.
Поскольку при
определении объема осреднения Q возникают дополнительные сложности, то
целесообразно заменить аппроксимирующие функции (106) и (107) на функции (29) -
(32) в зависимости от наименьшего размера сооружения в плане.
Движения грунта при
землетрясениях определяются осциллирующими по времени процессами. Поэтому кроме
интенсивности векторов сейсмического воздействия должен быть определен их
спектральный состав. Как известно, векторы могут быть определены двумя
способами: компонентами или модулем и направляющими косинусами с дополнительной
связью в виде их нормировки. В соответствии с этим представлением определяется
спектральный состав компонент или модуля и направляющих косинусов. Существует
большое количество модификаций спектрального анализа осциллирующих процессов:
различные виды спектров Фурье, спектральные плотности случайных процессов,
различные спектры реакции линейных осцилляторов, спектры коэффициентов
динамичности и т.д. Исходными данными о спектральном составе динамического
возмущения для расчета линейных систем являются спектры коэффициентов
динамичности, которые определяются в результате ряда преобразований исходной
информации. В работе [11] показана взаимосвязь между спектрами Фурье
детерминированных осциллирующих процессов и спектральными плотностями случайных
процессов, интегральными преобразованиями которых определяются спектры
коэффициентов динамичности, представляющие функции частот и коэффициентов
рассеяния энергии при колебаниях системы. В [11] приведена структура
необходимых для расчета спектров коэффициентов динамичности при двух способах
описания расчетной информации о векторах сейсмического воздействия:
компонентное представление и пространственно-инвариантное представление в виде
модуля и направляющих косинусов. При компонентном способе представления
информации требуется исходить из коэффициентов динамичности компонент векторов,
а при пространственно-инвариантном способе - из коэффициентов динамичности
модулей и направляющих косинусов. С помощью этих коэффициентов динамичности вычисляются
коэффициенты динамичности отдельных форм колебаний (см. (52)), которые, как
показано в [11], представляются отдельными квадратичными формами со структурой,
зависящей от способа представления информации и от учитываемых корреляционных
связей между векторами воздействия и их составляющих. В [11] дан анализ
достоинств и недостатков структур этих квадратичных форм для обоих способов
представления информации. Показано, что при отсутствии всех
корреляций данные квадратичные формы принимают однозначный вид (представляют
сумму квадратов отдельных составляющих), для которого становится возможным
применение упрощающих преобразований и сведение результатов к простым формулам
для определения коэффициентов динамичности отдельных форм колебаний. В
Рекомендациях принят компонентный способ представления спектральной информации
о векторах воздействия. Тогда при отсутствии всех корреляций коэффициенты
динамичности отдельных форм колебаний определяются в виде (52), а спектральная
информация о векторах ![]() ,
, ![]() и
и ![]() определяется диагональными матрицами вида:
определяется диагональными матрицами вида:
 ;
(108)
;
(108) ;
(109)
;
(109)
 ,
(110)
,
(110)где T - период
собственных колебаний рассматриваемого сооружения.
Ненулевые
диагональные члены этих матриц определяются по автокорреляции процессов
компонент векторов ![]() ,
, ![]() и
и ![]() по методике [11]. Нулевые члены матриц (101) -
(110) соответствуют коэффициентам динамичности, определяемым по функциям
взаимной корреляции между компонентами
по методике [11]. Нулевые члены матриц (101) -
(110) соответствуют коэффициентам динамичности, определяемым по функциям
взаимной корреляции между компонентами ![]() ,
, ![]() и
и ![]() .
Нулевыми эти члены приняты по двум причинам:
.
Нулевыми эти члены приняты по двум причинам:
- в настоящее время
данных по коэффициентам динамичности, определенных по взаимной корреляции между
процессами компонент векторов воздействия, очень мало и не представляется
возможным их нормировать;
- при учете этих
корреляций формулы по определению коэффициентов динамичности для отдельных форм
колебаний (52) существенно усложняются.
Для каждой из
матриц коэффициентов динамичности векторов ![]() ,
, ![]() и
и ![]() диагональные компоненты приняты равными между
собой. Тогда (108) - (110) можно представить в виде
диагональные компоненты приняты равными между
собой. Тогда (108) - (110) можно представить в виде
![]() ;
(111)
;
(111)
![]() ;
(112)
;
(112)
![]() ,
(113)
,
(113)
где E - единичная
матрица.
Поскольку настоящие
Рекомендации составлены в развитие СНиП II-7-81, то ![]() принят по данным
норм. Коэффициенты динамичности зависят также от коэффициентов потерь энергии и
от типа (категории) грунта. Поэтому в Рекомендациях коэффициенты динамичности
процессов ускорения поступательного движения грунта были нормированы по своим
максимальным значениям и представлены в виде (33), что дает возможность
дифференцированного учета грунтовых условий и потерь энергии при колебаниях
рассматриваемых систем. Грунтовые условия учитываются коэффициентом
принят по данным
норм. Коэффициенты динамичности зависят также от коэффициентов потерь энергии и
от типа (категории) грунта. Поэтому в Рекомендациях коэффициенты динамичности
процессов ускорения поступательного движения грунта были нормированы по своим
максимальным значениям и представлены в виде (33), что дает возможность
дифференцированного учета грунтовых условий и потерь энергии при колебаниях
рассматриваемых систем. Грунтовые условия учитываются коэффициентом ![]() по данным табл. 8. Потери энергии учитываются
коэффициентом
по данным табл. 8. Потери энергии учитываются
коэффициентом ![]() ,
значения которого соответствуют данным СНиП II-7-81 и принимаются по данным
табл. 9. Нормированные значения коэффициентов динамичности
,
значения которого соответствуют данным СНиП II-7-81 и принимаются по данным
табл. 9. Нормированные значения коэффициентов динамичности ![]() зависят только от периодов собственных
колебаний и в соответствии с требованиями СНиП II-7-81 для каждой категории
грунтов определяются своей кривой по рис. 5 или аппроксимирующими функциями
(34) и (35).
зависят только от периодов собственных
колебаний и в соответствии с требованиями СНиП II-7-81 для каждой категории
грунтов определяются своей кривой по рис. 5 или аппроксимирующими функциями
(34) и (35).
Коэффициенты
динамичности процессов углового ускорения и углов вращения сейсмического
воздействия ![]() и
и ![]() (112) - (113) приняты в Рекомендациях по
данным обработки ряда записей землетрясений. Эти коэффициенты динамичности
также зависят от грунтовых условий, потерь энергии и периодов собственных
колебаний. Поэтому в Рекомендациях они приняты в виде (37) и (39) (в
нормированном виде). Грунтовые условия учитываются тем же коэффициентом
(112) - (113) приняты в Рекомендациях по
данным обработки ряда записей землетрясений. Эти коэффициенты динамичности
также зависят от грунтовых условий, потерь энергии и периодов собственных
колебаний. Поэтому в Рекомендациях они приняты в виде (37) и (39) (в
нормированном виде). Грунтовые условия учитываются тем же коэффициентом ![]() .
Полученные в результате обработок значения
.
Полученные в результате обработок значения ![]() совпадают с данными СНиП II-7-81. Потери
энергии при колебаниях систем при обработке учитывались по более широкому
диапазону, чем в СНиП II-7-81. В частности, значения
совпадают с данными СНиП II-7-81. Потери
энергии при колебаниях систем при обработке учитывались по более широкому
диапазону, чем в СНиП II-7-81. В частности, значения ![]() принимались равными
0,1; 0,05; 0,02; 0,01; 0,005. В (37) и (39) потери энергии учитываются
коэффициентами
принимались равными
0,1; 0,05; 0,02; 0,01; 0,005. В (37) и (39) потери энергии учитываются
коэффициентами ![]() и
и ![]() ,
значения которых принимаются по данным табл. 10. Нормированные значения
коэффициентов динамичности
,
значения которых принимаются по данным табл. 10. Нормированные значения
коэффициентов динамичности ![]() и
и ![]() зависят только от периодов собственных
колебаний и не зависят от категории грунтов. Графики этих функций даны на рис.
6 и 7, а их аппроксимирующие функции определяются в виде (38).
зависят только от периодов собственных
колебаний и не зависят от категории грунтов. Графики этих функций даны на рис.
6 и 7, а их аппроксимирующие функции определяются в виде (38).
Следующей
характеристикой сейсмического воздействия являются параметры его ориентации в
пространстве, которые определяются в соответствии с требованиями п. 2.21.
Ориентация векторов сейсмического воздействия в пространстве определяется их
направляющими косинусами, которые отсчитываются относительно соответствующих
осей. В п. 2.21 описаны эти оси и даны условия нормировки направляющих
косинусов для векторов ![]() (41),
(41), ![]() (42) и
(42) и ![]() (43). Таким образом, расчетные параметры
ориентации в пространстве сейсмического воздействия определяются
соответствующими значениями направляющих косинусов. В п. 2.21 рекомендуется
исходить из двух групп значений направляющих косинусов.
(43). Таким образом, расчетные параметры
ориентации в пространстве сейсмического воздействия определяются
соответствующими значениями направляющих косинусов. В п. 2.21 рекомендуется
исходить из двух групп значений направляющих косинусов.
1. Наиболее
вероятные значения для заданного региона строительства, которые следует
принимать только как проверочные. Эти значения рекомендуется принимать с учетом
данных конкретной сейсмологической обстановки, как указано в п. 2.21. Расчет на
данные значения направляющих косинусов носит проверочный характер.
2. Основные
расчетные значения направляющих косинусов, расчет на которые является
обязательным. Сейсмическое воздействие может иметь произвольную ориентацию в
пространстве. Поэтому основные расчетные значения направляющих косинусов должны
быть такими, чтобы при них реализовывался максимум динамической реакции для
рассматриваемой формы колебаний. Максимум любого параметра динамической реакции
имеет место при максимуме коэффициента динамичности для рассматриваемой формы
колебаний (52). Поэтому задача сводится к исследованию на максимум функции (52)
по параметрам ![]() ,
, ![]() и
и ![]() (i = 1, 2, 3). Причем, по этим параметрам
функция (52) линейна, т.е. образует плоскость, для которой не существует
экстремумов. Однако, учитывая нелинейные связи между направляющими косинусами в
виде их нормировки (41) и (42), эта функция преобразуется в поверхность второго
порядка, для которой существуют экстремумы и задача сводится к их отысканию.
Такая задача может быть решена при двух типах условий:
(i = 1, 2, 3). Причем, по этим параметрам
функция (52) линейна, т.е. образует плоскость, для которой не существует
экстремумов. Однако, учитывая нелинейные связи между направляющими косинусами в
виде их нормировки (41) и (42), эта функция преобразуется в поверхность второго
порядка, для которой существуют экстремумы и задача сводится к их отысканию.
Такая задача может быть решена при двух типах условий:
- векторы ![]() ,
, ![]() и
и ![]() независимы друг от друга, что приводит к
независимости между их направляющими косинусами
независимы друг от друга, что приводит к
независимости между их направляющими косинусами ![]() ,
, ![]() и
и ![]() (i = 1, 2, 3);
(i = 1, 2, 3);
- между векторами
сейсмического воздействия существует определенная зависимость, т.е.
что приводит к
соответствующей зависимости между ![]() ,
, ![]() и
и ![]() (i = 1, 2, 3).
(i = 1, 2, 3).
Первая задача
решается при свободной вариации ![]() ,
, ![]() и
и ![]() с учетом связей (41) - (43). Вторая задача
решается сложнее и требует дополнительного исследования функций (114). Решение первой
задачи дано в виде (44) - (49), который для каждой формы колебаний определяет
ориентацию
с учетом связей (41) - (43). Вторая задача
решается сложнее и требует дополнительного исследования функций (114). Решение первой
задачи дано в виде (44) - (49), который для каждой формы колебаний определяет
ориентацию ![]() и
и ![]() ,
, ![]() при условии реализации максимума динамической
реакции. Объяснение физического смысла этой задачи дано в [11, 13].
при условии реализации максимума динамической
реакции. Объяснение физического смысла этой задачи дано в [11, 13].
Для каждой формы
колебаний определяются свои расчетные значения ![]() ,
, ![]() и
и ![]() (i = 1, 2, 3). Результаты расчета сводятся в
табл. 11.
(i = 1, 2, 3). Результаты расчета сводятся в
табл. 11.
Расчет
режима вынужденных колебаний
Расчет вынужденных
колебаний выполняется в соответствии с рекомендациями пп. 2.22 и 2.23 или 2.24.
В соответствии с п.
2.22 для каждой формы колебаний и для каждой группы расчетных значений
направляющих косинусов векторов ![]() ,
, ![]() и
и ![]() вычисляются коэффициенты динамичности форм по
формулам (52), которые представляют частный случай общих квадратичных форм [11]
при отсутствии корреляционных связей между
вычисляются коэффициенты динамичности форм по
формулам (52), которые представляют частный случай общих квадратичных форм [11]
при отсутствии корреляционных связей между ![]() ,
, ![]() и
и ![]() и их компонентами,
т.е. для матриц коэффициентов динамичности - компонент в виде (108) - (110).
Результаты вычислений сводятся в табл. 12. При этом для каждой формы колебаний
имеет место один максимум, соответствующий экстремальной ориентации
и их компонентами,
т.е. для матриц коэффициентов динамичности - компонент в виде (108) - (110).
Результаты вычислений сводятся в табл. 12. При этом для каждой формы колебаний
имеет место один максимум, соответствующий экстремальной ориентации ![]() ,
, ![]() и
и ![]() по (44) - (49). Значение этого максимума
равно:
по (44) - (49). Значение этого максимума
равно:
 ,
(115)
,
(115)
где ![]() ,
, ![]() и
и ![]() - коэффициенты (47) - (49) для j-ой формы
колебаний;
- коэффициенты (47) - (49) для j-ой формы
колебаний;
![]() - масса сооружения, приведенная к j-ой форме,
значения которой располагаются на главной диагонали таблицы
проверки условий ортогональности форм колебаний (см. табл. 7) или
вычисляются по формуле
- масса сооружения, приведенная к j-ой форме,
значения которой располагаются на главной диагонали таблицы
проверки условий ортогональности форм колебаний (см. табл. 7) или
вычисляются по формуле
![]() .
(116)
.
(116)
Для всех остальных
групп значений направляющих косинусов по табл. 11 имеют место соотношения
![]() ,
, ![]() .
(117)
.
(117)
Далее при расчете
режима вынужденных колебаний выполняются требования либо п. 2.23, либо п. 2.24,
в зависимости от того, какой метод расчета был принят для описания упругих свойств
расчетной динамической модели.
Если расчет
упругой системы выполнялся согласно п. 2.7 по методу сил и от действия
единичных сил и моментов (4) определялись перемещения (5) для формирования
матрицы податливости (68) - (73) (см. табл. 2), а также определялось
соответствующее напряженно-деформированное состояние рассчитываемых несущих
конструкций (см. табл. 1), то расчетными параметрами являются векторы
сейсмических сил и моментов, которые вычисляются по формулам (53), приведенным
в п. 2.23. Векторы сейсмических сил и
моментов вычисляются по (53) для всех значений ![]() (см. табл. 12), т.е. для каждой формы
колебаний и для каждого варианта ориентации векторов
(см. табл. 12), т.е. для каждой формы
колебаний и для каждого варианта ориентации векторов ![]() ,
, ![]() и
и ![]() . При
этом для каждой формы колебаний максимальные значения векторов сил и моментов
имеют место при значениях направляющих косинусов по (44) - (49). Все результаты
этого расчета целесообразно сводить в табл. 13.
. При
этом для каждой формы колебаний максимальные значения векторов сил и моментов
имеют место при значениях направляющих косинусов по (44) - (49). Все результаты
этого расчета целесообразно сводить в табл. 13.
Если расчет
упругой системы согласно п. 2.8 выполнялся по методу деформаций и от действия
единичных перемещений и углов поворота (6) определялись реакции (7) для
формирования матрицы жесткости (77) - (82) (см. табл. 4), а также вычислялось
соответствующее напряженно-деформированное состояние проверяемых несущих
конструкций (см. табл. 3), то расчетными параметрами являются векторы
перемещений центров масс и углов вращения тел, которые вычисляются по формулам (54), приведенным в п. 2.24. Векторы перемещений и углов вращения
вычисляются по (54) для всех значений ![]() (см. табл. 12), т.е. для каждой формы
колебаний и для каждого варианта ориентации векторов
(см. табл. 12), т.е. для каждой формы
колебаний и для каждого варианта ориентации векторов ![]() ,
, ![]() и
и ![]() .
.
Для каждой формы
колебаний максимальные значения перемещений и углов вращения тел имеют место
при значениях направляющих косинусов по (44) - (49). Результаты этого расчета
следует сводить в табл. 14.
Алгоритм определения
основных расчетных параметров (сил и моментов по (53) или перемещений и углов
по (54)) построен на основе замкнутых решений линейных
дифференциальных уравнений движения масс сооружения в предположении
упругой (линейной) работы материала несущих конструкций при малых величинах
перемещений и углов вращения масс. Воздействие принимается по нормированным
обработкам записей реальных землетрясений, при которых, в зависимости от
заложенных резервов прочности, в сооружениях, как правило, развиваются пластические
деформации, местные повреждения, приводящие к снижению сейсмических нагрузок. В
рамках линейной методики расчета учесть эти явления невозможно. Поэтому при
определении основных расчетных параметров по (53) или (54) вводится коэффициент
k, учитывающий допускаемый уровень накопления пластических деформаций и др.
местные повреждения, не приводящие к разрушению сооружения в целом. Значение
этого коэффициента зависит от вида рассчитываемого сооружения, и всегда k <=
1. Если сооружение относится к категории особо ответственных и в нем не
допускается образование каких-либо местных повреждений, то k всегда должен
приниматься равным единице. К числу таких сооружений
относятся крупные тепловые электростанции с тяжелым подвешенным оборудованием
(теплоагрегатами), атомные электростанции с тяжелым провисающим через несколько
этажей оборудованием, в которых согласно РТМ 108.031.114-85 и РТМ 108.020.37-81
не допускается образование пластических деформаций. В других случаях, когда
допускается образование пластических деформаций, значение k всегда меньше
единицы и зависит от индивидуальной способности принятой конструктивной схемы
сооружения к образованию и накоплению в ней пластических деформаций. Поэтому в
ходе проектирования значение этого коэффициента может корректироваться и должно
быть согласовано с рассматриваемой конструктивной схемой. Для специальных
промышленных сооружений, несущих тяжелое подвешенное оборудование, значение
этого коэффициента должно определяться в задании на проектирование, в
зависимости от ответственности рассчитываемого объекта и характера возможных
конструктивных схем его решения. В ходе выполнения расчетно-проектных работ
значение k может корректироваться и должно утверждаться заказчиком
применительно к окончательному варианту конструктивной схемы сооружения. При
этом в качестве ориентира могут быть приняты значения, аналогичные по смыслу
(например, коэффициент ![]() по табл. 3 СНиП II-7-81). При назначении
коэффициента k для гражданских зданий с подвешенными этажами следует иметь в
виду, что значение коэффициента
по табл. 3 СНиП II-7-81). При назначении
коэффициента k для гражданских зданий с подвешенными этажами следует иметь в
виду, что значение коэффициента ![]() по СНиП II-7-81 относится к сооружениям
обычной конструктивной схемы. Поэтому значения коэффициента k для такого типа
сооружений следует согласовать с ЦНИИСК им. В.А. Кучеренко, Госстроями союзных
республик и Госстроем СССР.
по СНиП II-7-81 относится к сооружениям
обычной конструктивной схемы. Поэтому значения коэффициента k для такого типа
сооружений следует согласовать с ЦНИИСК им. В.А. Кучеренко, Госстроями союзных
республик и Госстроем СССР.
Определение
расчетных значений внутренних усилий
в несущих
конструкциях сооружений
Рассматриваемые
методы позволяют определять внутренние усилия в несущих конструкциях без
дополнительного статического расчета сооружения на действие найденных значений
сейсмических сил и моментов. Исходными данными для
определения внутренних усилий в рассматриваемых несущих конструкциях являются
данные статического расчета (см. табл. 1) на действие единичных сил и моментов
(4) по п. 2.7 при формировании матрицы податливости ![]() или аналогичные данные от действия единичных
перемещений и углов вращения (6) (см. табл. 3) по (24) при формировании матрицы
жесткости [r], а также фактические величины сейсмических сил и моментов
(53) (см. п. 2.23, табл. 13) или соответствующие фактические величины
перемещений и углов вращения (54) (см. п. 2.24, табл. 14). Задача сводится к
корректировке единичных значений внутренних усилий (табл. 1 или 3) на
фактические значения нагрузки по п. 2.23 (табл. 13) или на фактические значения
перемещений и углов вращения по п. 2.24 (табл. 14). Алгоритм этого расчета
сформулирован в пп. 2.25 и 2.26, где пп. 2.25 и 2.26 относятся к различным
методам, поэтому, в зависимости от принятого в конкретном случае метода,
следует выполнять требования только одного из этих пунктов.
или аналогичные данные от действия единичных
перемещений и углов вращения (6) (см. табл. 3) по (24) при формировании матрицы
жесткости [r], а также фактические величины сейсмических сил и моментов
(53) (см. п. 2.23, табл. 13) или соответствующие фактические величины
перемещений и углов вращения (54) (см. п. 2.24, табл. 14). Задача сводится к
корректировке единичных значений внутренних усилий (табл. 1 или 3) на
фактические значения нагрузки по п. 2.23 (табл. 13) или на фактические значения
перемещений и углов вращения по п. 2.24 (табл. 14). Алгоритм этого расчета
сформулирован в пп. 2.25 и 2.26, где пп. 2.25 и 2.26 относятся к различным
методам, поэтому, в зависимости от принятого в конкретном случае метода,
следует выполнять требования только одного из этих пунктов.
Если расчет
упругих свойств выполнялся в соответствии с требованиями п. 2.7 по методу сил
для построения матрицы податливости ![]() и при этом определялись внутренние усилия от
действия единичной нагрузки (4) (см. табл. 1), а также по п. 2.23 вычислялись
фактические величины сейсмических сил и моментов (см. табл. 13), то необходимо
выполнять требования п. 2.25 по корректировке данных табл. 1 на данные табл. 13. В соответствии с (55) внутренние силы и моменты определяются
произведением единичных значений (см. табл. 1) на фактические величины
сейсмических сил и моментов (см. табл. 13) с последующим суммированием по всем
силам и моментам, относящимся к рассматриваемой форме колебаний. Таким образом,
для каждой формы колебаний и при каждом варианте ориентации векторов
сейсмического воздействия определяются требуемые для расчета внутренние усилия.
Результаты такого расчета сводятся в табл. 15.
и при этом определялись внутренние усилия от
действия единичной нагрузки (4) (см. табл. 1), а также по п. 2.23 вычислялись
фактические величины сейсмических сил и моментов (см. табл. 13), то необходимо
выполнять требования п. 2.25 по корректировке данных табл. 1 на данные табл. 13. В соответствии с (55) внутренние силы и моменты определяются
произведением единичных значений (см. табл. 1) на фактические величины
сейсмических сил и моментов (см. табл. 13) с последующим суммированием по всем
силам и моментам, относящимся к рассматриваемой форме колебаний. Таким образом,
для каждой формы колебаний и при каждом варианте ориентации векторов
сейсмического воздействия определяются требуемые для расчета внутренние усилия.
Результаты такого расчета сводятся в табл. 15.
Если расчет
упругих свойств выполнялся в соответствии с требованиями п. 2.8 по методу
деформаций для построения матрицы жесткости и при этом определялись внутренние
усилия от действия единичных перемещений и углов вращения (6) (см. табл. 3), а
также по п. 2.24 вычислялись фактические величины перемещений и углов вращения
масс (54) (см. табл. 14), то необходимо выполнять требования п. 2.26 по
корректировке данных табл. 3 на
данные табл. 14. Согласно (36) внутренние усилия (силы и моменты) определяются
произведением единичных значений (см. табл. 3) на фактические величины
перемещений и углов вращения (см. табл. 14) с последующим суммированием по всем
перемещениям и углам вращения, относящимся к рассматриваемой форме колебаний. В
результате для каждой формы колебаний и для каждого варианта ориентации
векторов сейсмического воздействия определяются требуемые для расчета
внутренние усилия, которые сводятся в табл. 16.
Данные табл. 15 и
табл. 16 представляют эквивалентный результат. Поэтому дальнейшая обработка
ведется безотносительно к применяемым методам расчета. Эта обработка
выполняется в соответствии с пп. 2.27 и 2.28.
Результаты табл. 15
или 16 представляют внутренние усилия для каждого варианта ориентации векторов
сейсмического воздействия по всем формам колебаний. Согласно п. 2.27 для
каждого варианта ориентации векторов сейсмического воздействия определяются
расчетные значения внутренних усилий, как среднеквадратичные величины (см. п. 2
СНиП II-7-81) значений, соответствующих отдельным формам колебаний. Следует
иметь в виду, что каждый вариант ориентации векторов сейсмического воздействия
по (44) - (49) определяет максимум значений внутренних усилий по
соответствующим формам колебаний, а все другие формы колебаний будут приводить
к малой добавке при определении расчетных значений внутренних усилий. С учетом
определения максимума реакции по ориентации векторов воздействия вопрос о
суммировании эффектов от отдельных форм колебаний приобретает менее острый
характер. Такая ситуация выражается более ясно, когда векторы коэффициентов
форм колебаний ![]() и
и ![]() для различных форм различно ориентированы в
пространстве. Таким образом, для каждого варианта ориентации векторов
сейсмического воздействия расчетные значения определяются, в основном,
максимумами по соответствующей форме колебаний. Для каждого варианта ориентации
для различных форм различно ориентированы в
пространстве. Таким образом, для каждого варианта ориентации векторов
сейсмического воздействия расчетные значения определяются, в основном,
максимумами по соответствующей форме колебаний. Для каждого варианта ориентации
![]() ,
, ![]() и
и ![]() эти расчетные значения сводятся в табл. 17.
эти расчетные значения сводятся в табл. 17.
Согласно п. 2.28
выполняется анализ расчетных значений внутренних усилий по данным табл. 17. Из
расчетных значений внутренних усилий, соответствующих различным вариантам
ориентации ![]() ,
, ![]() и
и ![]() , для
проверки несущей способности рассматриваемого элемента принимаются максимальные
значения, по которым, в сочетании с усилиями от отдельных (других) нагрузок,
проверяется прочность рассматриваемого элемента. Параллельно принятые расчетные
значения определяют наиболее невыгодную ориентацию векторов сейсмического
воздействия для рассматриваемого элемента сооружения. Для другого элемента
сооружения наиболее невыгодной может получиться другая ориентация векторов
сейсмического воздействия в пространстве.
, для
проверки несущей способности рассматриваемого элемента принимаются максимальные
значения, по которым, в сочетании с усилиями от отдельных (других) нагрузок,
проверяется прочность рассматриваемого элемента. Параллельно принятые расчетные
значения определяют наиболее невыгодную ориентацию векторов сейсмического
воздействия для рассматриваемого элемента сооружения. Для другого элемента
сооружения наиболее невыгодной может получиться другая ориентация векторов
сейсмического воздействия в пространстве.
СПИСОК
ЛИТЕРАТУРЫ
1. Корн Г.,
Корн Т, Справочник по математике для научных работников и инженеров. - М.:
Наука, 1976. - 832 с.
2. Ландау
Л.Д., Лифшиц Е.М. Теория поля. - М.: Наука, 1973. - 504 с.
3. Назаров
Ю.П. Упругогравитационные колебания сооружений с подвешенными массами при
сейсмических воздействиях//Строительная механика и расчет сооружений. - 1985. -
N 2. - С. 56 - 61.
4. Назаров
Ю.П. Методы расчета упругогравитационных колебаний энергетических сооружений с
тяжелым подвешенным оборудованием при сейсмических воздействиях//Тр. НПО ЦКТИ
им. Ползунова. - Л., 1984. Вып. 212. - С. 66 - 81.
5. Назаров Ю.П.,
Васюнкин А.Н. Векторный анализ записей сильных землетрясений//Тр. ин-та ЦНИИСК
им. В.А. Кучеренко. - 1983. - Исследования по теории сейсмостойкости
сооружений. - С. 79 - 91.
6. Назаров
Ю.П., Аюнц В.А., Джинчвелашвили Г.А. Численные параметры векторов сейсмического
воздействия Газлийского землетрясения 1976 г. //Строительная механика и расчет
сооружений. - 1984. - N 2. - С. 41 - 45.
7.
Николаенко Н.А., Назаров Ю.П. Динамика и сейсмостойкость пространственных
конструкций сооружений//Исследования по теории сооружений. - 1977. - Вып.
XXIII. - С. 66-98.
8. Николаенко Н.А.,
Назаров Ю.П. Векторное представление сейсмического воздействия//Строительная
механика и расчет сооружений. - 1980. - N 1. - С. 53 - 59.
9.
Николаенко Н.А., Поляков С.В., Назаров Ю.П. Оценки интенсивности и
спектрального состава компонент векторов сейсмического воздействия//Строительная
механика и расчет сооружений. - 1983. - N 1. - С. 58 - 63.
10. Николаенко
Н.А., Назаров Ю.П. Инвариантные оценки случайных векторов динамического
воздействия//Строительная механика и расчет сооружений. - 1983. - N 6. - С. 54
- 60.
11.
Николаенко Н.А., Назаров Ю.П. Динамика и сейсмостойкость сооружений. - М.:
Стройиздат, 1987. - 222 с.
12. Рекомендации по
расчету на сейсмические воздействия инженерного и встроенного технологического
оборудования. - М.: ЦНИИСК им. В.А. Кучеренко, 1984. - 14 с.
13.
Рекомендации по определению расчетной сейсмической нагрузки для сооружений с
учетом пространственного характера воздействия и работы конструкций. - М.:
ЦНИИСК им. В.А. Кучеренко, 1989. - 160 с.
14. Руководящий
технический материал (РТМ) 108.031.114-85. Котлы паровые стационарные. Нормы
расчета на прочность при сейсмическом воздействии//Тр.
НПО ЦКТИ им. Ползунова. - Л., 1986. - 57 с.
15.
Руководящий технический материал (РТМ) 108.020.37-81. Оборудование атомных
энергетических установок. Расчет на прочность при сейсмическом воздействии//Тр. НПО ЦКТИ им. Ползунова. - Л., 1986. - 35 с.
16. СНиП
II-7-81. Строительство в сейсмических районах. - Ч. II, гл. 7.
ТЕХНОРМАТИВЫ ДЛЯ СТРОИТЕЛЕЙ И ПРОЕКТИРОВЩИКОВ
Copyright © www.docstroika.ru, 2013 -
2024